 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Context Scaling with LongCat ZigZag Attention
Dec 30, 2025We introduce LongCat ZigZag Attention (LoZA), which is a sparse attention scheme designed to transform any existing full-attention models into sparse versions with rather limited compute budget. In long-context scenarios, LoZA can achieve significant speed-ups both for prefill-intensive (e.g., retrieval-augmented generation) and decode-intensive (e.g., tool-integrated reasoning) cases. Specifically, by applying LoZA to LongCat-Flash during mid-training, we serve LongCat-Flash-Exp as a long-context foundation model that can swiftly process up to 1 million tokens, enabling efficient long-term reasoning and long-horizon agentic capabilities.
Safe Planner: Empowering Safety Awareness in Large Pre-Trained Models for Robot Task Planning
Nov 11, 2024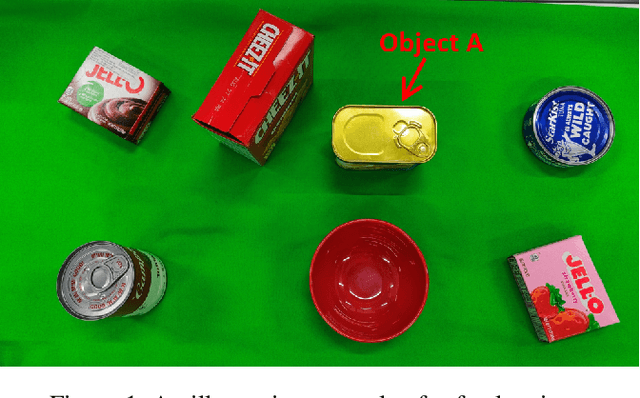
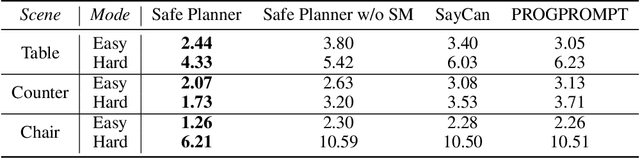
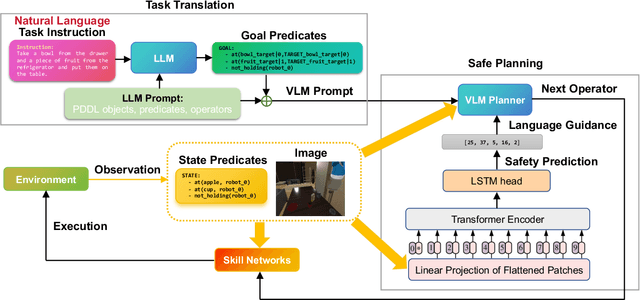
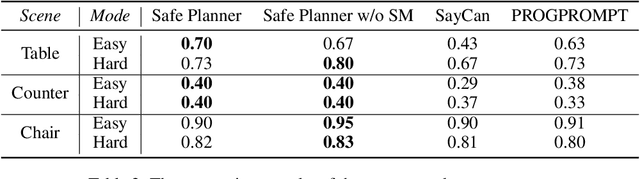
Robot task planning is an important problem for autonomous robots in long-horizon challenging tasks. As large pre-trained models have demonstrated superior planning ability, recent research investigates utilizing large models to achieve autonomous planning for robots in diverse tasks. However, since the large models are pre-trained with Internet data and lack the knowledge of real task scenes, large models as planners may make unsafe decisions that hurt the robots and the surrounding environments. To solve this challenge, we propose a novel Safe Planner framework, which empowers safety awareness in large pre-trained models to accomplish safe and executable planning. In this framework, we develop a safety prediction module to guide the high-level large model planner, and this safety module trained in a simulator can be effectively transferred to real-world tasks. The proposed Safe Planner framework is evaluated on both simulated environments and real robots. The experiment results demonstrate that Safe Planner not only achieves state-of-the-art task success rates, but also substantially improves safety during task execution. The experiment videos are shown in https://sites.google.com/view/safeplanner .
Learning for Biomedical Information Extraction: Methodological Review of Recent Advances
Jun 26, 2016
Biomedical information extraction (BioIE) is important to many applications, including clinical decision support, integrative biology, and pharmacovigilance, and therefore it has been an active research. Unlike existing reviews covering a holistic view on BioIE, this review focuses on mainly recent advances in learning based approaches, by systematically summarizing them into different aspects of methodological development. In addition, we dive into open information extraction and deep learning, two emerging and influential techniques and envision next generation of BioIE.