 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCloud2Edge Elastic AI Framework for Prototyping and Deployment of AI Inference Engines in Autonomous Vehicles
Sep 23, 2020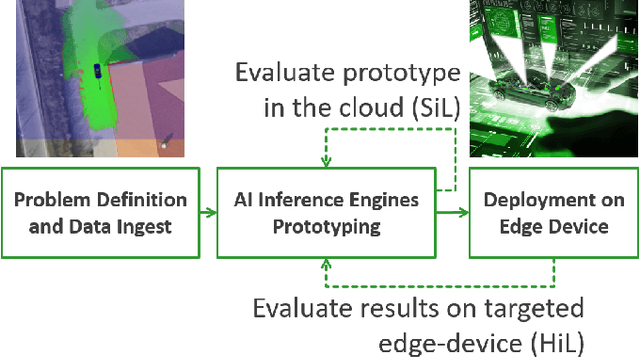
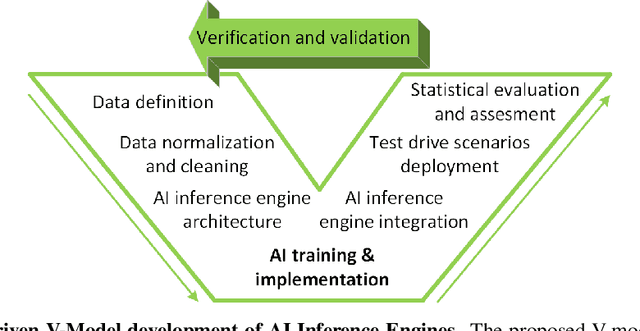
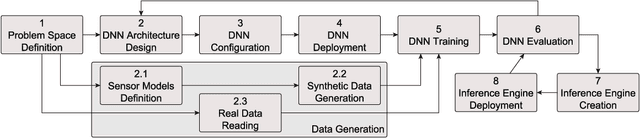
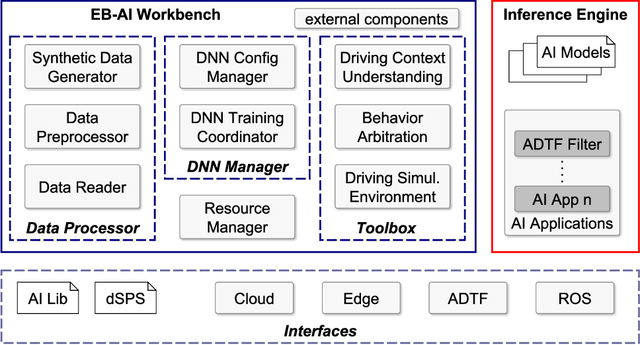
Self-driving cars and autonomous vehicles are revolutionizing the automotive sector, shaping the future of mobility altogether. Although the integration of novel technologies such as Artificial Intelligence (AI) and Cloud/Edge computing provides golden opportunities to improve autonomous driving applications, there is the need to modernize accordingly the whole prototyping and deployment cycle of AI components. This paper proposes a novel framework for developing so-called AI Inference Engines for autonomous driving applications based on deep learning modules, where training tasks are deployed elastically over both Cloud and Edge resources, with the purpose of reducing the required network bandwidth, as well as mitigating privacy issues. Based on our proposed data driven V-Model, we introduce a simple yet elegant solution for the AI components development cycle, where prototyping takes place in the cloud according to the Software-in-the-Loop (SiL) paradigm, while deployment and evaluation on the target ECUs (Electronic Control Units) is performed as Hardware-in-the-Loop (HiL) testing. The effectiveness of the proposed framework is demonstrated using two real-world use-cases of AI inference engines for autonomous vehicles, that is environment perception and most probable path prediction.
Landmine Detection Using Autoencoders on Multi-polarization GPR Volumetric Data
Oct 02, 2018



Buried landmines and unexploded remnants of war are a constant threat for the population of many countries that have been hit by wars in the past years. The huge amount of human lives lost due to this phenomenon has been a strong motivation for the research community toward the development of safe and robust techniques designed for landmine clearance. Nonetheless, being able to detect and localize buried landmines with high precision in an automatic fashion is still considered a challenging task due to the many different boundary conditions that characterize this problem (e.g., several kinds of objects to detect, different soils and meteorological conditions, etc.). In this paper, we propose a novel technique for buried object detection tailored to unexploded landmine discovery. The proposed solution exploits a specific kind of convolutional neural network (CNN) known as autoencoder to analyze volumetric data acquired with ground penetrating radar (GPR) using different polarizations. This method works in an anomaly detection framework, indeed we only train the autoencoder on GPR data acquired on landmine-free areas. The system then recognizes landmines as objects that are dissimilar to the soil used during the training step. Experiments conducted on real data show that the proposed technique requires little training and no ad-hoc data pre-processing to achieve accuracy higher than 93% on challenging datasets.