 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBilevel Planning with Learned Symbolic Abstractions from Interaction Data
Mar 09, 2026Intelligent agents must reason over both continuous dynamics and discrete representations to generate effective plans in complex environments. Previous studies have shown that symbolic abstractions can emerge from neural effect predictors trained with a robot's unsupervised exploration. However, these methods rely on deterministic symbolic domains, lack mechanisms to verify the generated symbolic plans, and operate only at the abstract level, often failing to capture the continuous dynamics of the environment. To overcome these limitations, we propose a bilevel neuro-symbolic framework in which learned probabilistic symbolic rules generate candidate plans rapidly at the high level, and learned continuous effect models verify these plans and perform forward search when necessary at the low level. Our experiments on multi-object manipulation tasks demonstrate that the proposed bilevel method outperforms symbolic-only approaches, reliably identifying failing plans through verification, and achieves planning performance statistically comparable to continuous forward search while resolving most problems via efficient symbolic reasoning.
RAMPA: Robotic Augmented Reality for Machine Programming and Automation
Oct 17, 2024As robotics continue to enter various sectors beyond traditional industrial applications, the need for intuitive robot training and interaction systems becomes increasingly more important. This paper introduces Robotic Augmented Reality for Machine Programming (RAMPA), a system that utilizes the capabilities of state-of-the-art and commercially available AR headsets, e.g., Meta Quest 3, to facilitate the application of Programming from Demonstration (PfD) approaches on industrial robotic arms, such as Universal Robots UR10. Our approach enables in-situ data recording, visualization, and fine-tuning of skill demonstrations directly within the user's physical environment. RAMPA addresses critical challenges of PfD, such as safety concerns, programming barriers, and the inefficiency of collecting demonstrations on the actual hardware. The performance of our system is evaluated against the traditional method of kinesthetic control in teaching three different robotic manipulation tasks and analyzed with quantitative metrics, measuring task performance and completion time, trajectory smoothness, system usability, user experience, and task load using standardized surveys. Our findings indicate a substantial advancement in how robotic tasks are taught and refined, promising improvements in operational safety, efficiency, and user engagement in robotic programming.
MRI-powered Magnetic Miniature Capsule Robot with HIFU-controlled On-demand Drug Delivery
Jan 17, 2023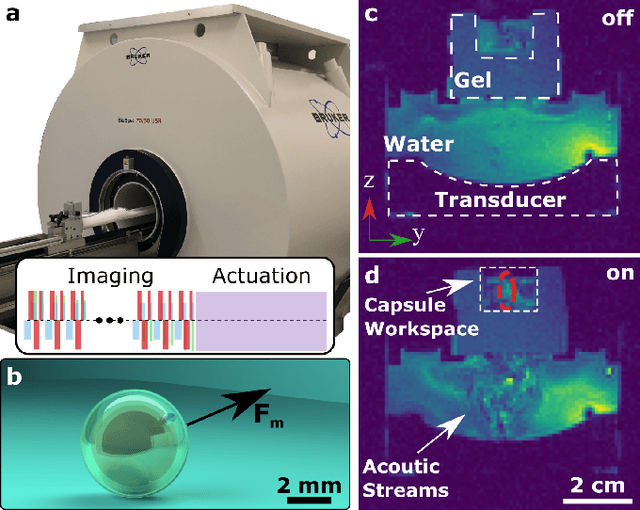
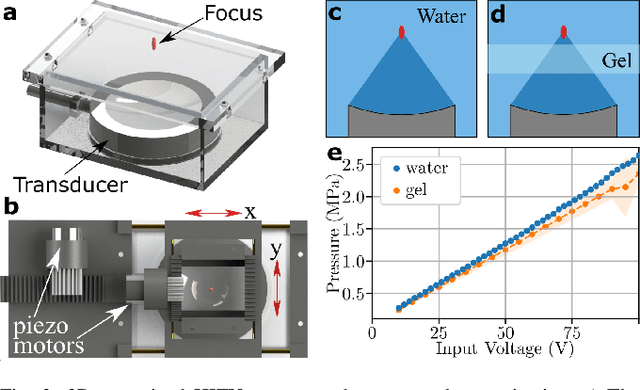
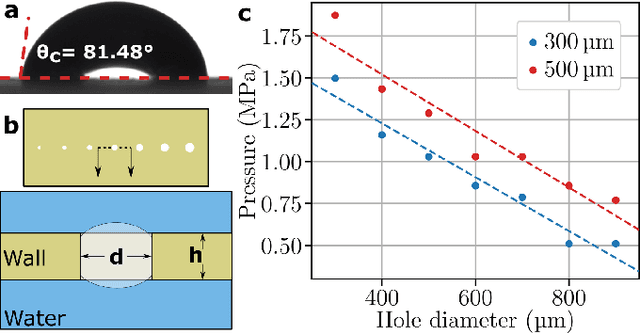

Magnetic resonance imaging (MRI)-guided robotic systems offer great potential for new minimally invasive medical tools, including MRI-powered miniature robots. By re-purposing the imaging hardware of an MRI scanner, the magnetic miniature robot could be navigated into the remote part of the patient's body without needing tethered endoscopic tools. However, the state-of-art MRI-powered magnetic miniature robots have limited functionality besides navigation. Here, we propose an MRI-powered magnetic miniature capsule robot benefiting from acoustic streaming forces generated by MRI-guided high-intensity focus ultrasound (HIFU) for controlled drug release. Our design comprises a polymer capsule shell with a submillimeter-diameter drug-release hole that captures an air bubble functioning as a stopper. We use the HIFU pulse to initiate drug release by removing the air bubble once the capsule robot reaches the target location. By controlling acoustic pressure, we also regulate the drug release rate for multiple location targeting during navigation. We demonstrated that the proposed magnetic capsule robot could travel at high speed up to 1.13 cm/s in ex vivo porcine small intestine and release drug to multiple target sites in a single operation, using a combination of MRI-powered actuation and HIFU-controlled release. The proposed MRI-guided microrobotic drug release system will greatly impact minimally invasive medical procedures by allowing on-demand targeted drug delivery.