 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMRI-powered Magnetic Miniature Capsule Robot with HIFU-controlled On-demand Drug Delivery
Jan 17, 2023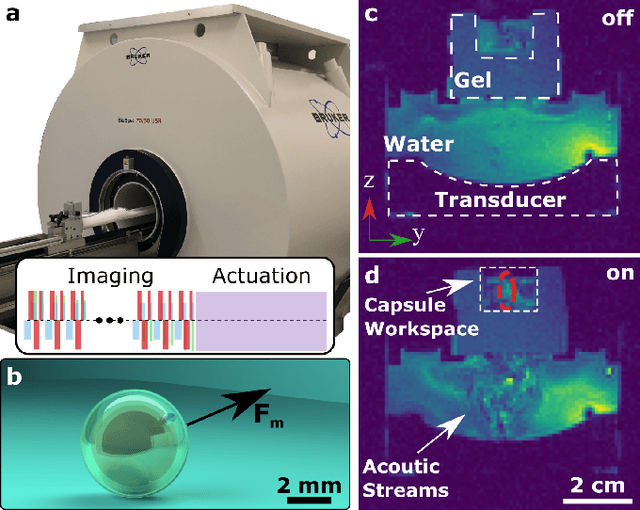

Magnetic resonance imaging (MRI)-guided robotic systems offer great potential for new minimally invasive medical tools, including MRI-powered miniature robots. By re-purposing the imaging hardware of an MRI scanner, the magnetic miniature robot could be navigated into the remote part of the patient's body without needing tethered endoscopic tools. However, the state-of-art MRI-powered magnetic miniature robots have limited functionality besides navigation. Here, we propose an MRI-powered magnetic miniature capsule robot benefiting from acoustic streaming forces generated by MRI-guided high-intensity focus ultrasound (HIFU) for controlled drug release. Our design comprises a polymer capsule shell with a submillimeter-diameter drug-release hole that captures an air bubble functioning as a stopper. We use the HIFU pulse to initiate drug release by removing the air bubble once the capsule robot reaches the target location. By controlling acoustic pressure, we also regulate the drug release rate for multiple location targeting during navigation. We demonstrated that the proposed magnetic capsule robot could travel at high speed up to 1.13 cm/s in ex vivo porcine small intestine and release drug to multiple target sites in a single operation, using a combination of MRI-powered actuation and HIFU-controlled release. The proposed MRI-guided microrobotic drug release system will greatly impact minimally invasive medical procedures by allowing on-demand targeted drug delivery.