 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Data-Driven Multi-Jet Locomotion Inspired by Salps
Mar 11, 2025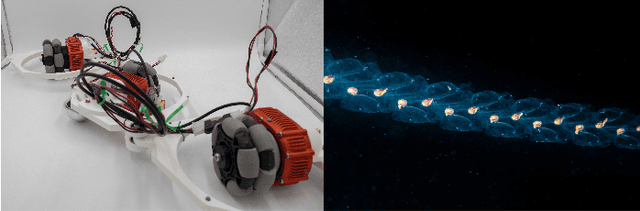
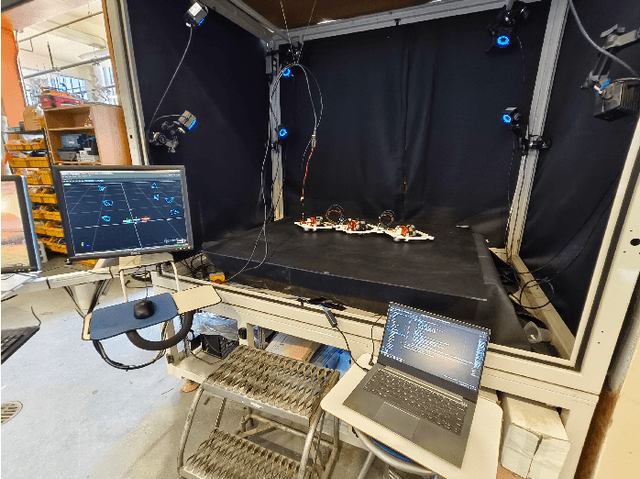
Salps are marine animals consisting of chains of jellyfish-like units. Their capacity for effective underwater undulatory locomotion through coordinating multi-jet propulsion has aroused significant interest in the field of robotics and inspired extensive research including design, modeling, and control. In this paper, we conduct a comprehensive analysis of the locomotion of salp-like systems using the robotic platform "LandSalp" based on geometric mechanics, including mechanism design, dynamic modeling, system identification, and motion planning and control. Our work takes a step toward a better understanding of salps' underwater locomotion and provides a clear path for extending these insights to more complex and capable underwater robotic systems. Furthermore, this study illustrates the effectiveness of geometric mechanics in bio-inspired robots for efficient data-driven locomotion modeling, demonstrated by learning the dynamics of LandSalp from only 3 minutes of experimental data. Lastly, we extend the geometric mechanics principles to multi-jet propulsion systems with stability considerations and validate the theory through experiments on the LandSalp hardware.
HISSbot: Sidewinding with a Soft Snake Robot
Mar 28, 2023



Snake robots are characterized by their ability to navigate through small spaces and loose terrain by utilizing efficient cyclic forms of locomotion. Soft snake robots are a subset of these robots which utilize soft, compliant actuators to produce movement. Prior work on soft snake robots has primarily focused on planar gaits, such as undulation. More efficient spatial gaits, such as sidewinding, are unexplored gaits for soft snake robots. We propose a novel means of constructing a soft snake robot capable of sidewinding, and introduce the Helical Inflating Soft Snake Robot (HISSbot). We validate this actuation through the physical HISSbot, and demonstrate its ability to sidewind across various surfaces. Our tests show robustness in locomotion through low-friction and granular media.
Linear Kinematics for General Constant Curvature and Torsion Manipulators
Feb 22, 2023We present a novel general model that unifies the kinematics of constant curvature and constant twist continuum manipulators. Combining this kinematics with energy-based physics, we derive a linear mapping from actuator configuration to manipulator deformation that is analogous to traditional robot forward kinematics. Our model generalizes across manipulators with different sizes, types of bending, and types of actuators, without the need for parameter re-fitting. The combination of generality and linearity makes the model useful for control and planning algorithms. Finally, our model is shown to be accurate through experimental validation on manipulators with pneumatic artificial muscles.