 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTREND: A Whitespace Replacement Information Hiding Method
Feb 18, 2025Large Language Models (LLMs) have gained significant popularity in recent years. Differentiating between a text written by a human and a text generated by an LLM has become almost impossible. Information hiding techniques such as digital watermarking or steganography can help by embedding information inside text without being noticed. However, existing techniques, such as linguistic-based or format-based methods, change the semantics or do not work on pure, unformatted text. In this paper, we introduce a novel method for information hiding termed TREND, which is able to conceal any byte-encoded sequence within a cover text. The proposed method is implemented as a multi-platform library using the Kotlin programming language, accompanied by a command-line tool and a web interface provided as examples of usage. By substituting conventional whitespace characters with visually similar Unicode whitespace characters, our proposed scheme preserves the semantics of the cover text without increasing the number of characters. Furthermore, we propose a specified structure for secret messages that enables configurable compression, encryption, hashing, and error correction. Our experimental benchmark comparison on a dataset of one million Wikipedia articles compares ten algorithms from literature and practice. It proves the robustness of our proposed method in various applications while remaining imperceptible to humans. We discuss the limitations of limited embedding capacity and further robustness, which guide implications for future work.
Interpretable Anomaly Detection via Discrete Optimization
Mar 24, 2023



Anomaly detection is essential in many application domains, such as cyber security, law enforcement, medicine, and fraud protection. However, the decision-making of current deep learning approaches is notoriously hard to understand, which often limits their practical applicability. To overcome this limitation, we propose a framework for learning inherently interpretable anomaly detectors from sequential data. More specifically, we consider the task of learning a deterministic finite automaton (DFA) from a given multi-set of unlabeled sequences. We show that this problem is computationally hard and develop two learning algorithms based on constraint optimization. Moreover, we introduce novel regularization schemes for our optimization problems that improve the overall interpretability of our DFAs. Using a prototype implementation, we demonstrate that our approach shows promising results in terms of accuracy and F1 score.
Automatic Seizure Detection Using the Pulse Transit Time
Jul 13, 2021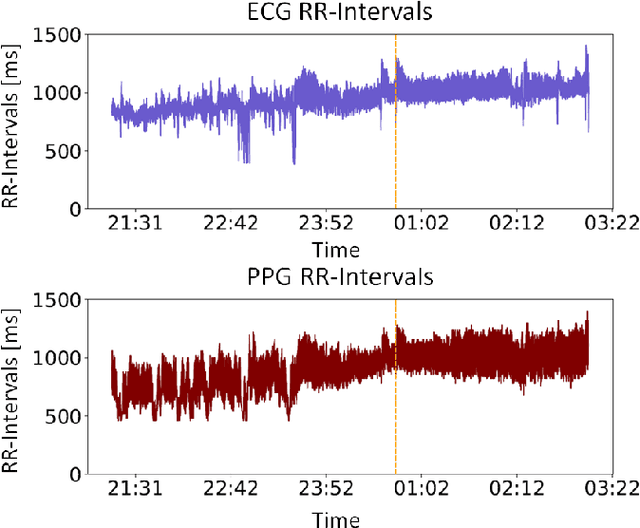

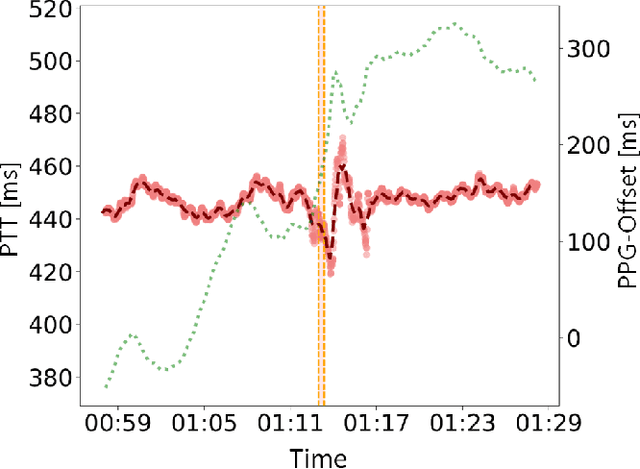

Documentation of epileptic seizures plays an essential role in planning medical therapy. Solutions for automated epileptic seizure detection can help improve the current problem of incomplete and erroneous manual documentation of epileptic seizures. In recent years, a number of wearable sensors have been tested for this purpose. However, detecting seizures with subtle symptoms remains difficult and current solutions tend to have a high false alarm rate. Seizures can also affect the patient's arterial blood pressure, which has not yet been studied for detection with sensors. The pulse transit time (PTT) provides a noninvasive estimate of arterial blood pressure. It can be obtained by using to two sensors, which are measuring the time differences between arrivals of the pulse waves. Due to separated time chips a clock drift emerges, which is strongly influencing the PTT. In this work, we present an algorithm which responds to alterations in the PTT, considering the clock drift and enabling the noninvasive monitoring of blood pressure alterations using separated sensors. Furthermore we investigated whether seizures can be detected using the PTT. Our results indicate that using the algorithm, it is possible to detect seizures with a Random Forest. Using the PTT along with other signals in a multimodal approach, the detection of seizures with subtle symptoms could thereby be improved.
Towards the Verification of Safety-critical Autonomous Systems in Dynamic Environments
Dec 15, 2016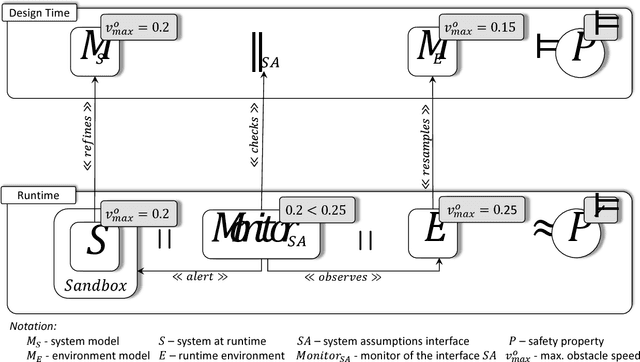
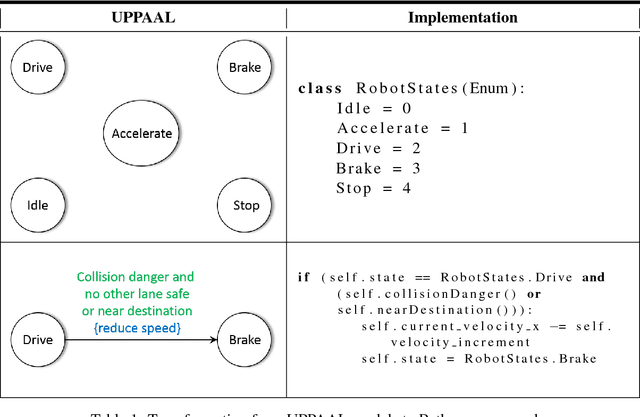
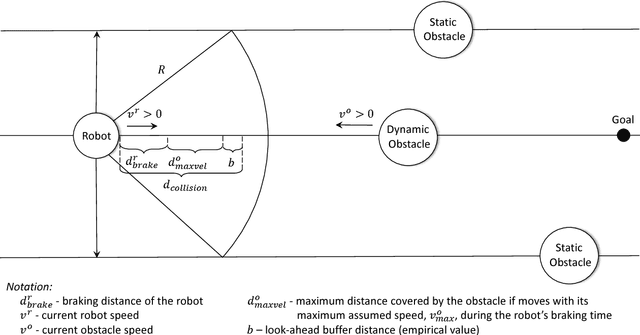

There is an increasing necessity to deploy autonomous systems in highly heterogeneous, dynamic environments, e.g. service robots in hospitals or autonomous cars on highways. Due to the uncertainty in these environments, the verification results obtained with respect to the system and environment models at design-time might not be transferable to the system behavior at run time. For autonomous systems operating in dynamic environments, safety of motion and collision avoidance are critical requirements. With regard to these requirements, Macek et al. [6] define the passive safety property, which requires that no collision can occur while the autonomous system is moving. To verify this property, we adopt a two phase process which combines static verification methods, used at design time, with dynamic ones, used at run time. In the design phase, we exploit UPPAAL to formalize the autonomous system and its environment as timed automata and the safety property as TCTL formula and to verify the correctness of these models with respect to this property. For the runtime phase, we build a monitor to check whether the assumptions made at design time are also correct at run time. If the current system observations of the environment do not correspond to the initial system assumptions, the monitor sends feedback to the system and the system enters a passive safe state.
* In Proceedings V2CPS-16, arXiv:1612.04023