 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Method for the Runtime Validation of AI-based Environment Perception in Automated Driving System
Dec 21, 2024



Environment perception is a fundamental part of the dynamic driving task executed by Autonomous Driving Systems (ADS). Artificial Intelligence (AI)-based approaches have prevailed over classical techniques for realizing the environment perception. Current safety-relevant standards for automotive systems, International Organization for Standardization (ISO) 26262 and ISO 21448, assume the existence of comprehensive requirements specifications. These specifications serve as the basis on which the functionality of an automotive system can be rigorously tested and checked for compliance with safety regulations. However, AI-based perception systems do not have complete requirements specification. Instead, large datasets are used to train AI-based perception systems. This paper presents a function monitor for the functional runtime monitoring of a two-folded AI-based environment perception for ADS, based respectively on camera and LiDAR sensors. To evaluate the applicability of the function monitor, we conduct a qualitative scenario-based evaluation in a controlled laboratory environment using a model car. The evaluation results then are discussed to provide insights into the monitor's performance and its suitability for real-world applications.
Connected Dependability Cage Approach for Safe Automated Driving
Jul 12, 2023Automated driving systems can be helpful in a wide range of societal challenges, e.g., mobility-on-demand and transportation logistics for last-mile delivery, by aiding the vehicle driver or taking over the responsibility for the dynamic driving task partially or completely. Ensuring the safety of automated driving systems is no trivial task, even more so for those systems of SAE Level 3 or above. To achieve this, mechanisms are needed that can continuously monitor the system's operating conditions, also denoted as the system's operational design domain. This paper presents a safety concept for automated driving systems which uses a combination of onboard runtime monitoring via connected dependability cage and off-board runtime monitoring via a remote command control center, to continuously monitor the system's ODD. On one side, the connected dependability cage fulfills a double functionality: (1) to monitor continuously the operational design domain of the automated driving system, and (2) to transfer the responsibility in a smooth and safe manner between the automated driving system and the off-board remote safety driver, who is present in the remote command control center. On the other side, the remote command control center enables the remote safety driver the monitoring and takeover of the vehicle's control. We evaluate our safety concept for automated driving systems in a lab environment and on a test field track and report on results and lessons learned.
Towards the Verification of Safety-critical Autonomous Systems in Dynamic Environments
Dec 15, 2016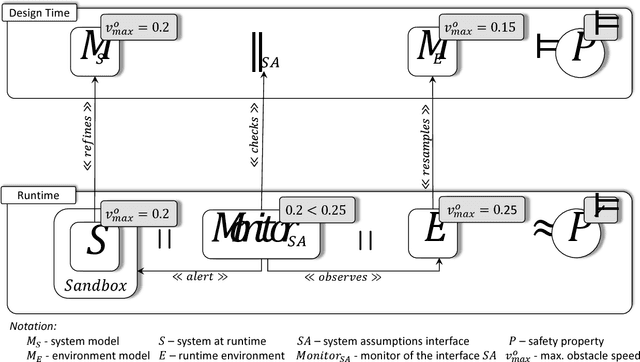
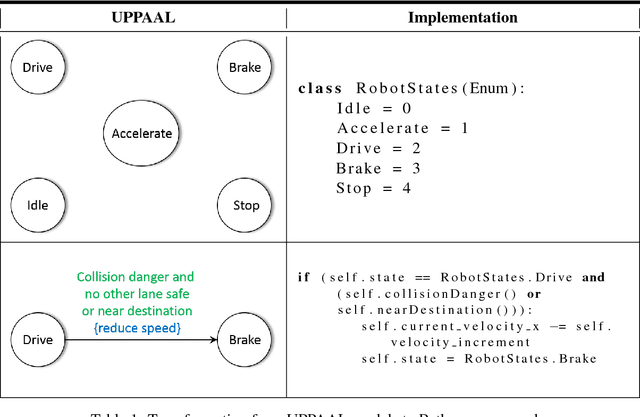
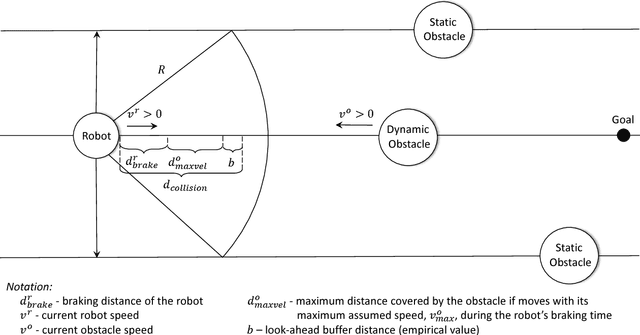

There is an increasing necessity to deploy autonomous systems in highly heterogeneous, dynamic environments, e.g. service robots in hospitals or autonomous cars on highways. Due to the uncertainty in these environments, the verification results obtained with respect to the system and environment models at design-time might not be transferable to the system behavior at run time. For autonomous systems operating in dynamic environments, safety of motion and collision avoidance are critical requirements. With regard to these requirements, Macek et al. [6] define the passive safety property, which requires that no collision can occur while the autonomous system is moving. To verify this property, we adopt a two phase process which combines static verification methods, used at design time, with dynamic ones, used at run time. In the design phase, we exploit UPPAAL to formalize the autonomous system and its environment as timed automata and the safety property as TCTL formula and to verify the correctness of these models with respect to this property. For the runtime phase, we build a monitor to check whether the assumptions made at design time are also correct at run time. If the current system observations of the environment do not correspond to the initial system assumptions, the monitor sends feedback to the system and the system enters a passive safe state.
* In Proceedings V2CPS-16, arXiv:1612.04023