 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProportional Fairness in Obnoxious Facility Location
Jan 11, 2023We consider the obnoxious facility location problem (in which agents prefer the facility location to be far from them) and propose a hierarchy of distance-based proportional fairness concepts for the problem. These fairness axioms ensure that groups of agents at the same location are guaranteed to be a distance from the facility proportional to their group size. We consider deterministic and randomized mechanisms, and compute tight bounds on the price of proportional fairness. In the deterministic setting, not only are our proportional fairness axioms incompatible with strategyproofness, the Nash equilibria may not guarantee welfare within a constant factor of the optimal welfare. On the other hand, in the randomized setting, we identify proportionally fair and strategyproof mechanisms that give an expected welfare within a constant factor of the optimal welfare.
Task Allocation using a Team of Robots
Jul 20, 2022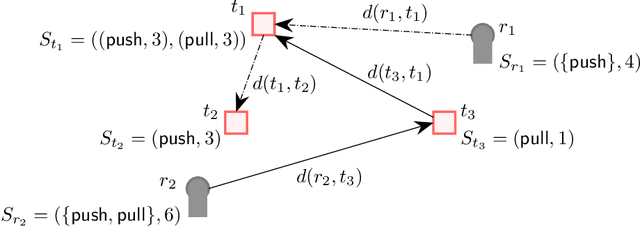
Task allocation using a team or coalition of robots is one of the most important problems in robotics, computer science, operational research, and artificial intelligence. In recent work, research has focused on handling complex objectives and feasibility constraints amongst other variations of the multi-robot task allocation problem. There are many examples of important research progress in these directions. We present a general formulation of the task allocation problem that generalizes several versions that are well-studied. Our formulation includes the states of robots, tasks, and the surrounding environment in which they operate. We describe how the problem can vary depending on the feasibility constraints, objective functions, and the level of dynamically changing information. In addition, we discuss existing solution approaches for the problem including optimization-based approaches, and market-based approaches.
Multi-Robot Task Allocation -- Complexity and Approximation
Mar 23, 2021
Multi-robot task allocation is one of the most fundamental classes of problems in robotics and is crucial for various real-world robotic applications such as search, rescue and area exploration. We consider the Single-Task robots and Multi-Robot tasks Instantaneous Assignment (ST-MR-IA) setting where each task requires at least a certain number of robots and each robot can work on at most one task and incurs an operational cost for each task. Our aim is to consider a natural computational problem of allocating robots to complete the maximum number of tasks subject to budget constraints. We consider budget constraints of three different kinds: (1) total budget, (2) task budget, and (3) robot budget. We provide a detailed complexity analysis including results on approximations as well as polynomial-time algorithms for the general setting and important restricted settings.