 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Ergonomic Role Allocation Framework for Dynamic Human-Robot Collaborative Tasks
Jan 19, 2023



By incorporating ergonomics principles into the task allocation processes, human-robot collaboration (HRC) frameworks can favour the prevention of work-related musculoskeletal disorders (WMSDs). In this context, existing offline methodologies do not account for the variability of human actions and states; therefore, planning and dynamically assigning roles in human-robot teams remains an unaddressed challenge.This study aims to create an ergonomic role allocation framework that optimises the HRC, taking into account task features and human state measurements. The presented framework consists of two main modules: the first provides the HRC task model, exploiting AND/OR Graphs (AOG)s, which we adapted to solve the allocation problem; the second module describes the ergonomic risk assessment during task execution through a risk indicator and updates the AOG-related variables to influence future task allocation. The proposed framework can be combined with any time-varying ergonomic risk indicator that evaluates human cognitive and physical burden. In this work, we tested our framework in an assembly scenario, introducing a risk index named Kinematic Wear.The overall framework has been tested with a multi-subject experiment. The task allocation results and subjective evaluations, measured with questionnaires, show that high-risk actions are correctly recognised and not assigned to humans, reducing fatigue and frustration in collaborative tasks.
A Comprehensive Architecture for Dynamic Role Allocation and Collaborative Task Planning in Mixed Human-Robot Teams
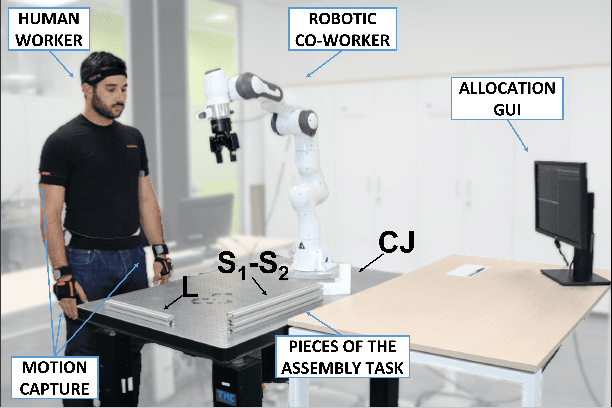
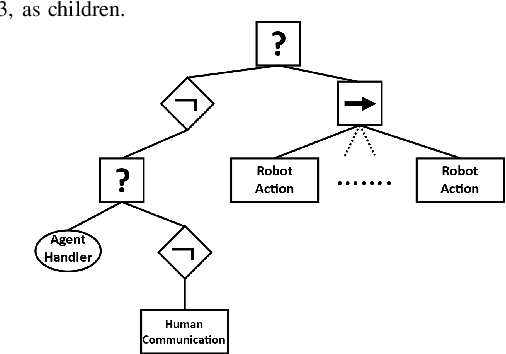
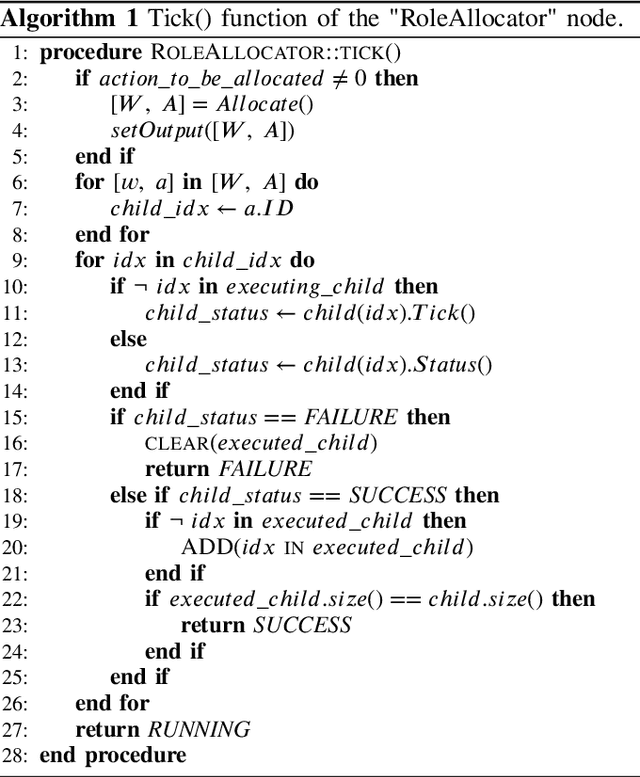
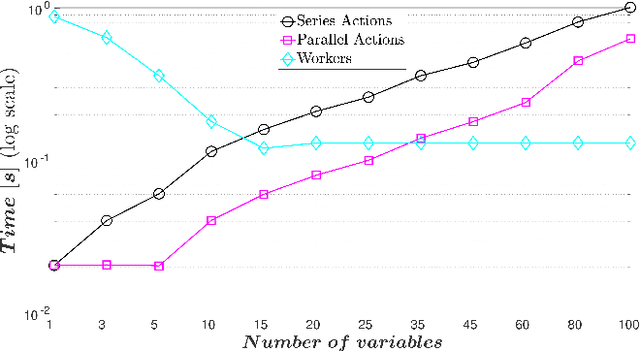
Jan 19, 2023The growing deployment of human-robot collaborative processes in several industrial applications, such as handling, welding, and assembly, unfolds the pursuit of systems which are able to manage large heterogeneous teams and, at the same time, monitor the execution of complex tasks. In this paper, we present a novel architecture for dynamic role allocation and collaborative task planning in a mixed human-robot team of arbitrary size. The architecture capitalizes on a centralized reactive and modular task-agnostic planning method based on Behavior Trees (BTs), in charge of actions scheduling, while the allocation problem is formulated through a Mixed-Integer Linear Program (MILP), that assigns dynamically individual roles or collaborations to the agents of the team. Different metrics used as MILP cost allow the architecture to favor various aspects of the collaboration (e.g. makespan, ergonomics, human preferences). Human preference are identified through a negotiation phase, in which, an human agent can accept/refuse to execute the assigned task.In addition, bilateral communication between humans and the system is achieved through an Augmented Reality (AR) custom user interface that provides intuitive functionalities to assist and coordinate workers in different action phases. The computational complexity of the proposed methodology outperforms literature approaches in industrial sized jobs and teams (problems up to 50 actions and 20 agents in the team with collaborations are solved within 1\;s). The different allocated roles, as the cost functions change, highlights the flexibility of the architecture to several production requirements. Finally, the subjective evaluation demonstrating the high usability level and the suitability for the targeted scenario.
Dynamic Human-Robot Role Allocation based on Human Ergonomics Risk Prediction and Robot Actions Adaptation
Nov 05, 2021


Despite cobots have high potential in bringing several benefits in the manufacturing and logistic processes, but their rapid (re-)deployment in changing environments is still limited. To enable fast adaptation to new product demands and to boost the fitness of the human workers to the allocated tasks, we propose a novel method that optimizes assembly strategies and distributes the effort among the workers in human-robot cooperative tasks. The cooperation model exploits AND/OR Graphs that we adapted to solve also the role allocation problem. The allocation algorithm considers quantitative measurements that are computed online to describe human operator's ergonomic status and task properties. We conducted preliminary experiments to demonstrate that the proposed approach succeeds in controlling the task allocation process to ensure safe and ergonomic conditions for the human worker.
An Integrated Dynamic Method for Allocating Roles and Planning Tasks for Mixed Human-Robot Teams
May 25, 2021
This paper proposes a novel integrated dynamic method based on Behavior Trees for planning and allocating tasks in mixed human robot teams, suitable for manufacturing environments. The Behavior Tree formulation allows encoding a single job as a compound of different tasks with temporal and logic constraints. In this way, instead of the well-studied offline centralized optimization problem, the role allocation problem is solved with multiple simplified online optimization sub-problem, without complex and cross-schedule task dependencies. These sub-problems are defined as Mixed-Integer Linear Programs, that, according to the worker-actions related costs and the workers' availability, allocate the yet-to-execute tasks among the available workers. To characterize the behavior of the developed method, we opted to perform different simulation experiments in which the results of the action-worker allocation and computational complexity are evaluated. The obtained results, due to the nature of the algorithm and to the possibility of simulating the agents' behavior, should describe well also how the algorithm performs in real experiments.