 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHALO: Hallucination Analysis and Learning Optimization to Empower LLMs with Retrieval-Augmented Context for Guided Clinical Decision Making
Sep 16, 2024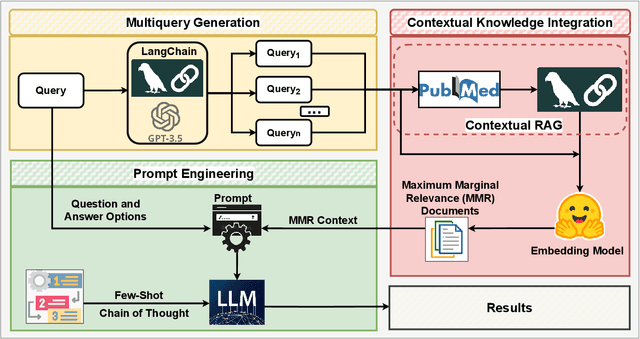
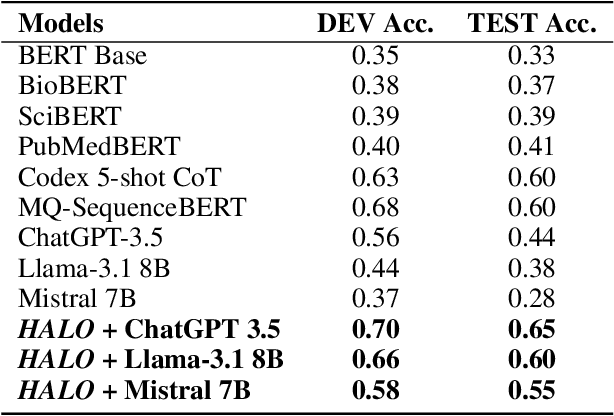
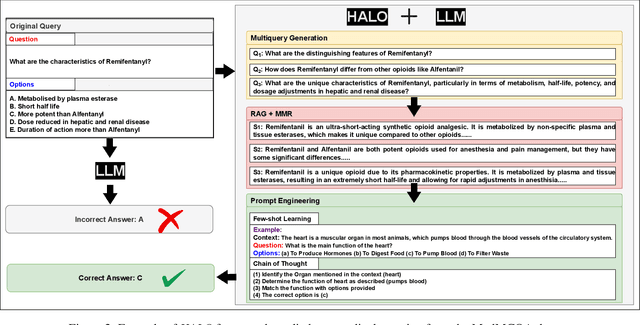
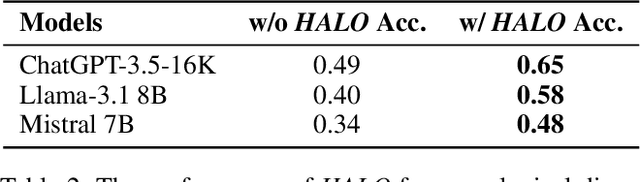
Large language models (LLMs) have significantly advanced natural language processing tasks, yet they are susceptible to generating inaccurate or unreliable responses, a phenomenon known as hallucination. In critical domains such as health and medicine, these hallucinations can pose serious risks. This paper introduces HALO, a novel framework designed to enhance the accuracy and reliability of medical question-answering (QA) systems by focusing on the detection and mitigation of hallucinations. Our approach generates multiple variations of a given query using LLMs and retrieves relevant information from external open knowledge bases to enrich the context. We utilize maximum marginal relevance scoring to prioritize the retrieved context, which is then provided to LLMs for answer generation, thereby reducing the risk of hallucinations. The integration of LangChain further streamlines this process, resulting in a notable and robust increase in the accuracy of both open-source and commercial LLMs, such as Llama-3.1 (from 44% to 65%) and ChatGPT (from 56% to 70%). This framework underscores the critical importance of addressing hallucinations in medical QA systems, ultimately improving clinical decision-making and patient care. The open-source HALO is available at: https://github.com/ResponsibleAILab/HALO.
A Simulated Experiment to Explore Robotic Dialogue Strategies for People with Dementia
Apr 18, 2021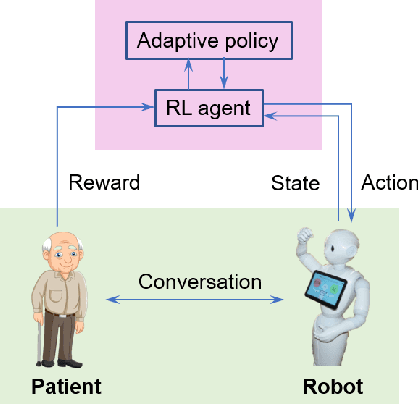
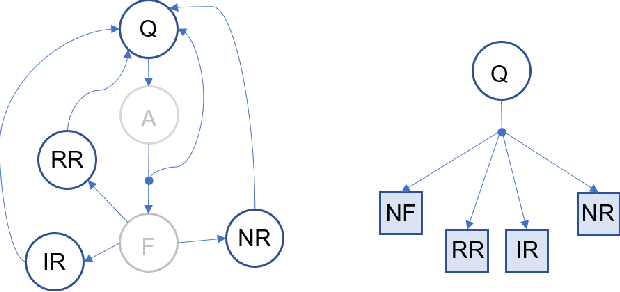
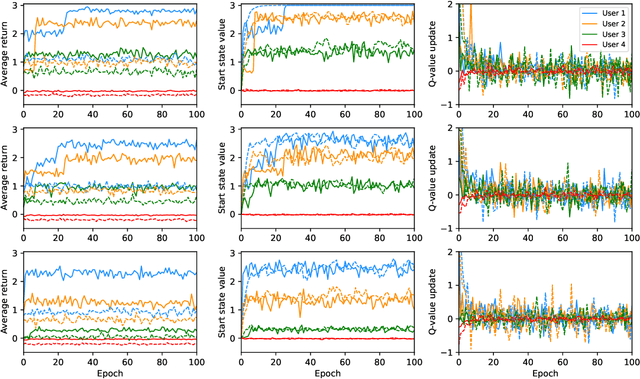
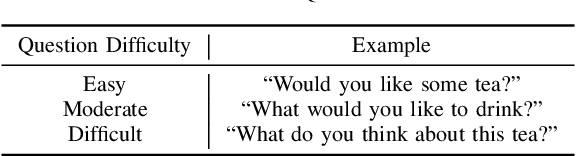
People with Alzheimer's disease and related dementias (ADRD) often show the problem of repetitive questioning, which brings a great burden on persons with ADRD (PwDs) and their caregivers. Conversational robots hold promise of coping with this problem and hence alleviating the burdens on caregivers. In this paper, we proposed a partially observable markov decision process (POMDP) model for the PwD-robot interaction in the context of repetitive questioning, and used Q-learning to learn an adaptive conversation strategy (i.e., rate of follow-up question and difficulty of follow-up question) towards PwDs with different cognitive capabilities and different engagement levels. The results indicated that Q-learning was helpful for action selection for the robot. This may be a useful step towards the application of conversational social robots to cope with repetitive questioning in PwDs.