 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Cost of EFX: Generalized-Mean Welfare and Complexity Dichotomies with Few Surplus Items
Jan 19, 2026Envy-freeness up to any good (EFX) is a central fairness notion for allocating indivisible goods, yet its existence is unresolved in general. In the setting with few surplus items, where the number of goods exceeds the number of agents by a small constant (at most three), EFX allocations are guaranteed to exist, shifting the focus from existence to efficiency and computation. We study how EFX interacts with generalized-mean ($p$-mean) welfare, which subsumes commonly-studied utilitarian ($p=1$), Nash ($p=0$), and egalitarian ($p \rightarrow -\infty$) objectives. We establish sharp complexity dichotomies at $p=0$: for any fixed $p \in (0,1]$, both deciding whether EFX can attain the global $p$-mean optimum and computing an EFX allocation maximizing $p$-mean welfare are NP-hard, even with at most three surplus goods; in contrast, for any fixed $p \leq 0$, we give polynomial-time algorithms that optimize $p$-mean welfare within the space of EFX allocations and efficiently certify when EFX attains the global optimum. We further quantify the welfare loss of enforcing EFX via the price of fairness framework, showing that for $p > 0$, the loss can grow linearly with the number of agents, whereas for $p \leq 0$, it is bounded by a constant depending on the surplus (and for Nash welfare it vanishes asymptotically). Finally we show that requiring Pareto-optimality alongside EFX is NP-hard (and becomes $Σ_2^P$-complete for a stronger variant of EFX). Overall, our results delineate when EFX is computationally costly versus structurally aligned with welfare maximization in the setting with few surplus items.
Fairness in Repeated Matching: A Maximin Perspective
Oct 06, 2025We study a sequential decision-making model where a set of items is repeatedly matched to the same set of agents over multiple rounds. The objective is to determine a sequence of matchings that either maximizes the utility of the least advantaged agent at the end of all rounds (optimal) or at the end of every individual round (anytime optimal). We investigate the computational challenges associated with finding (anytime) optimal outcomes and demonstrate that these problems are generally computationally intractable. However, we provide approximation algorithms, fixed-parameter tractable algorithms, and identify several special cases whereby the problem(s) can be solved efficiently. Along the way, we also establish characterizations of Pareto-optimal/maximum matchings, which may be of independent interest to works in matching theory and house allocation.
Stochastic Bandits for Egalitarian Assignment
Oct 08, 2024



We study EgalMAB, an egalitarian assignment problem in the context of stochastic multi-armed bandits. In EgalMAB, an agent is tasked with assigning a set of users to arms. At each time step, the agent must assign exactly one arm to each user such that no two users are assigned to the same arm. Subsequently, each user obtains a reward drawn from the unknown reward distribution associated with its assigned arm. The agent's objective is to maximize the minimum expected cumulative reward among all users over a fixed horizon. This problem has applications in areas such as fairness in job and resource allocations, among others. We design and analyze a UCB-based policy EgalUCB and establish upper bounds on the cumulative regret. In complement, we establish an almost-matching policy-independent impossibility result.
Behavioral Refinement via Interpolant-based Policy Diffusion
Feb 25, 2024



Imitation learning empowers artificial agents to mimic behavior by learning from demonstrations. Recently, diffusion models, which have the ability to model high-dimensional and multimodal distributions, have shown impressive performance on imitation learning tasks. These models learn to shape a policy by diffusing actions (or states) from standard Gaussian noise. However, the target policy to be learned is often significantly different from Gaussian and this mismatch can result in poor performance when using a small number of diffusion steps (to improve inference speed) and under limited data. The key idea in this work is that initiating from a more informative source than Gaussian enables diffusion methods to overcome the above limitations. We contribute both theoretical results, a new method, and empirical findings that show the benefits of using an informative source policy. Our method, which we call BRIDGER, leverages the stochastic interpolants framework to bridge arbitrary policies, thus enabling a flexible approach towards imitation learning. It generalizes prior work in that standard Gaussians can still be applied, but other source policies can be used if available. In experiments on challenging benchmarks, BRIDGER outperforms state-of-the-art diffusion policies and we provide further analysis on design considerations when applying BRIDGER.
Observed Adversaries in Deep Reinforcement Learning
Oct 13, 2022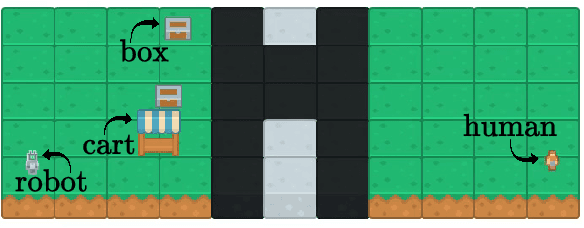

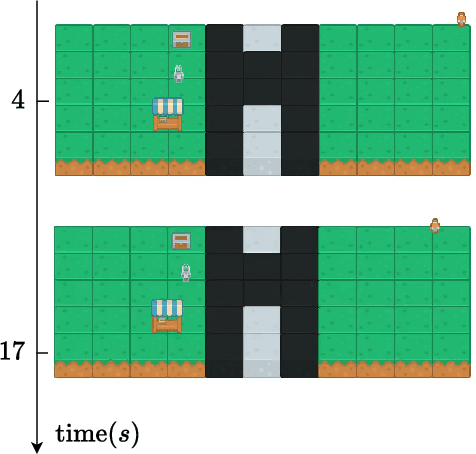
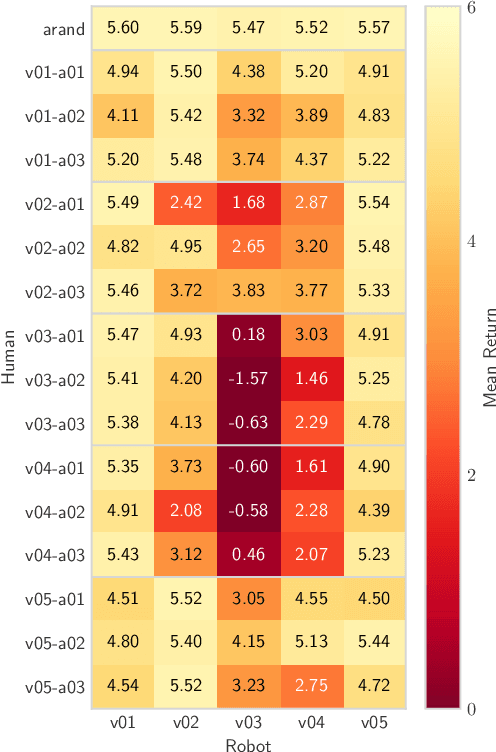
In this work, we point out the problem of observed adversaries for deep policies. Specifically, recent work has shown that deep reinforcement learning is susceptible to adversarial attacks where an observed adversary acts under environmental constraints to invoke natural but adversarial observations. This setting is particularly relevant for HRI since HRI-related robots are expected to perform their tasks around and with other agents. In this work, we demonstrate that this effect persists even with low-dimensional observations. We further show that these adversarial attacks transfer across victims, which potentially allows malicious attackers to train an adversary without access to the target victim.
Extended Tactile Perception: Vibration Sensing through Tools and Grasped Objects
Jun 01, 2021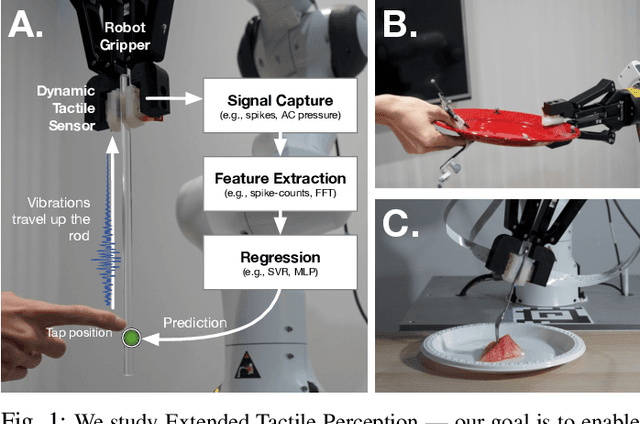
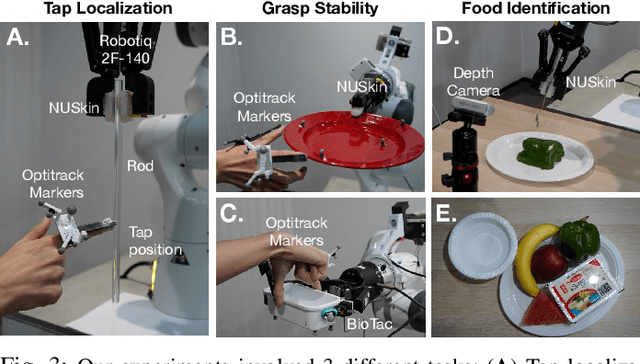
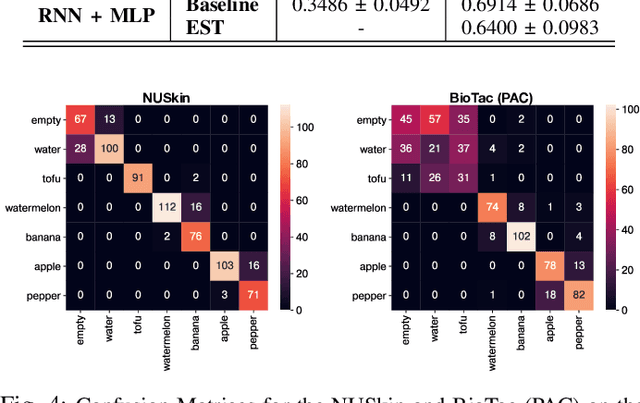
Humans display the remarkable ability to sense the world through tools and other held objects. For example, we are able to pinpoint impact locations on a held rod and tell apart different textures using a rigid probe. In this work, we consider how we can enable robots to have a similar capacity, i.e., to embody tools and extend perception using standard grasped objects. We propose that vibro-tactile sensing using dynamic tactile sensors on the robot fingers, along with machine learning models, enables robots to decipher contact information that is transmitted as vibrations along rigid objects. This paper reports on extensive experiments using the BioTac micro-vibration sensor and a new event dynamic sensor, the NUSkin, capable of multi-taxel sensing at 4~kHz. We demonstrate that fine localization on a held rod is possible using our approach (with errors less than 1 cm on a 20 cm rod). Next, we show that vibro-tactile perception can lead to reasonable grasp stability prediction during object handover, and accurate food identification using a standard fork. We find that multi-taxel vibro-tactile sensing at sufficiently high sampling rate (above 2 kHz) led to the best performance across the various tasks and objects. Taken together, our results provides both evidence and guidelines for using vibro-tactile perception to extend tactile perception, which we believe will lead to enhanced competency with tools and better physical human-robot-interaction.