 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtended Tactile Perception: Vibration Sensing through Tools and Grasped Objects
Paper and Code
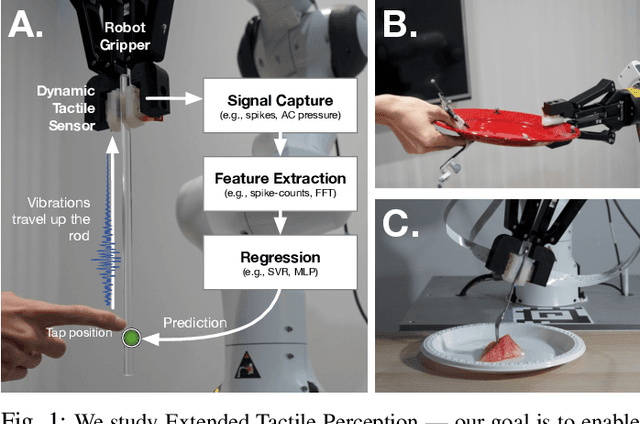
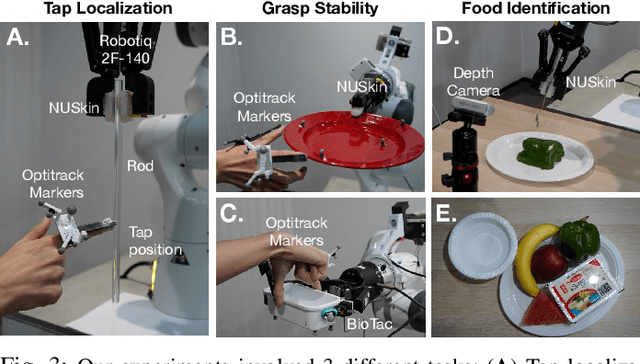
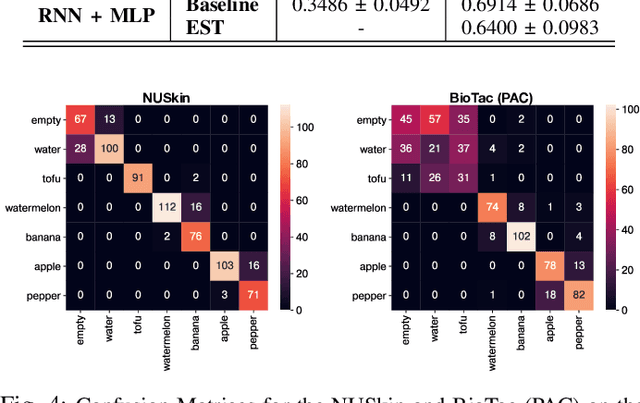
Humans display the remarkable ability to sense the world through tools and other held objects. For example, we are able to pinpoint impact locations on a held rod and tell apart different textures using a rigid probe. In this work, we consider how we can enable robots to have a similar capacity, i.e., to embody tools and extend perception using standard grasped objects. We propose that vibro-tactile sensing using dynamic tactile sensors on the robot fingers, along with machine learning models, enables robots to decipher contact information that is transmitted as vibrations along rigid objects. This paper reports on extensive experiments using the BioTac micro-vibration sensor and a new event dynamic sensor, the NUSkin, capable of multi-taxel sensing at 4~kHz. We demonstrate that fine localization on a held rod is possible using our approach (with errors less than 1 cm on a 20 cm rod). Next, we show that vibro-tactile perception can lead to reasonable grasp stability prediction during object handover, and accurate food identification using a standard fork. We find that multi-taxel vibro-tactile sensing at sufficiently high sampling rate (above 2 kHz) led to the best performance across the various tasks and objects. Taken together, our results provides both evidence and guidelines for using vibro-tactile perception to extend tactile perception, which we believe will lead to enhanced competency with tools and better physical human-robot-interaction.