 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQT-Opt: Scalable Deep Reinforcement Learning for Vision-Based Robotic Manipulation
Nov 28, 2018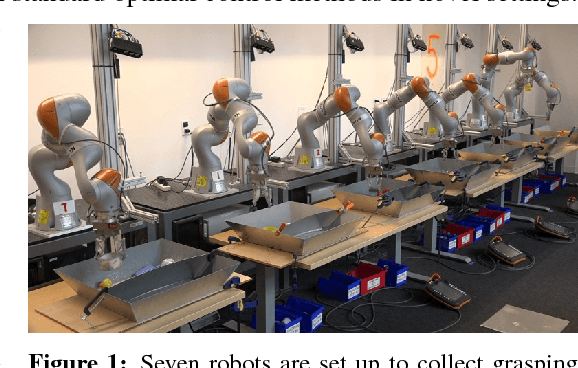

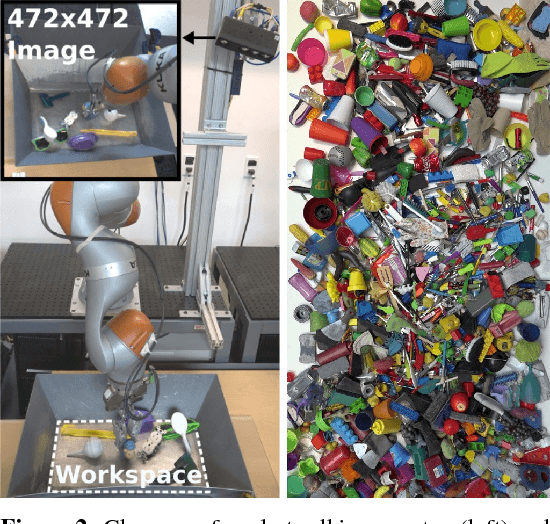
In this paper, we study the problem of learning vision-based dynamic manipulation skills using a scalable reinforcement learning approach. We study this problem in the context of grasping, a longstanding challenge in robotic manipulation. In contrast to static learning behaviors that choose a grasp point and then execute the desired grasp, our method enables closed-loop vision-based control, whereby the robot continuously updates its grasp strategy based on the most recent observations to optimize long-horizon grasp success. To that end, we introduce QT-Opt, a scalable self-supervised vision-based reinforcement learning framework that can leverage over 580k real-world grasp attempts to train a deep neural network Q-function with over 1.2M parameters to perform closed-loop, real-world grasping that generalizes to 96% grasp success on unseen objects. Aside from attaining a very high success rate, our method exhibits behaviors that are quite distinct from more standard grasping systems: using only RGB vision-based perception from an over-the-shoulder camera, our method automatically learns regrasping strategies, probes objects to find the most effective grasps, learns to reposition objects and perform other non-prehensile pre-grasp manipulations, and responds dynamically to disturbances and perturbations.
Deep Reinforcement Learning for Robotic Manipulation with Asynchronous Off-Policy Updates
Nov 23, 2016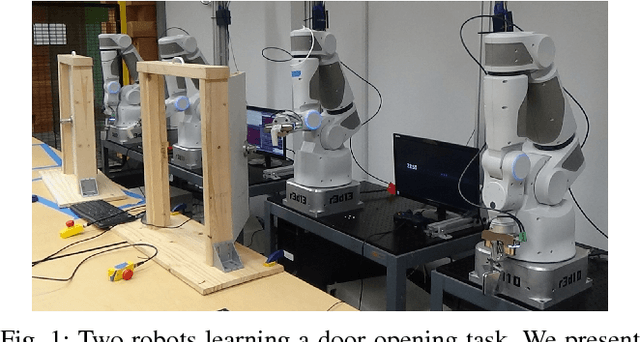



Reinforcement learning holds the promise of enabling autonomous robots to learn large repertoires of behavioral skills with minimal human intervention. However, robotic applications of reinforcement learning often compromise the autonomy of the learning process in favor of achieving training times that are practical for real physical systems. This typically involves introducing hand-engineered policy representations and human-supplied demonstrations. Deep reinforcement learning alleviates this limitation by training general-purpose neural network policies, but applications of direct deep reinforcement learning algorithms have so far been restricted to simulated settings and relatively simple tasks, due to their apparent high sample complexity. In this paper, we demonstrate that a recent deep reinforcement learning algorithm based on off-policy training of deep Q-functions can scale to complex 3D manipulation tasks and can learn deep neural network policies efficiently enough to train on real physical robots. We demonstrate that the training times can be further reduced by parallelizing the algorithm across multiple robots which pool their policy updates asynchronously. Our experimental evaluation shows that our method can learn a variety of 3D manipulation skills in simulation and a complex door opening skill on real robots without any prior demonstrations or manually designed representations.