 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJaywalkerVR: A VR System for Collecting Safety-Critical Pedestrian-Vehicle Interactions
Jul 05, 2024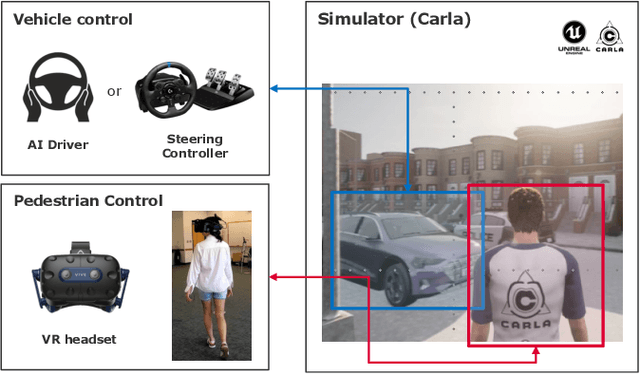
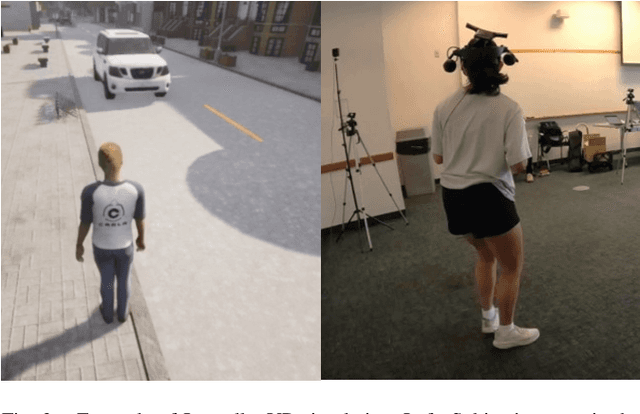
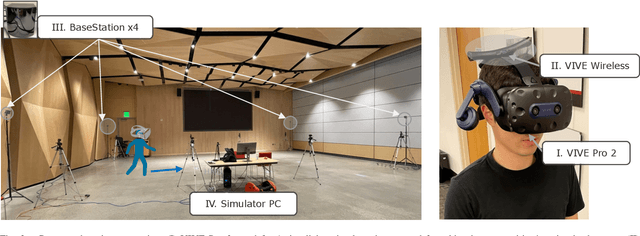
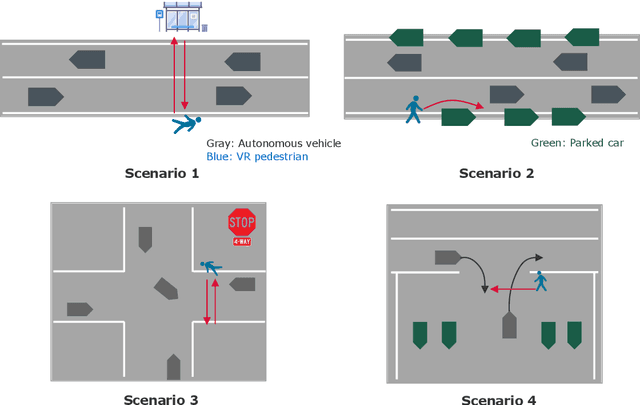
Developing autonomous vehicles that can safely interact with pedestrians requires large amounts of pedestrian and vehicle data in order to learn accurate pedestrian-vehicle interaction models. However, gathering data that include crucial but rare scenarios - such as pedestrians jaywalking into heavy traffic - can be costly and unsafe to collect. We propose a virtual reality human-in-the-loop simulator, JaywalkerVR, to obtain vehicle-pedestrian interaction data to address these challenges. Our system enables efficient, affordable, and safe collection of long-tail pedestrian-vehicle interaction data. Using our proposed simulator, we create a high-quality dataset with vehicle-pedestrian interaction data from safety critical scenarios called CARLA-VR. The CARLA-VR dataset addresses the lack of long-tail data samples in commonly used real world autonomous driving datasets. We demonstrate that models trained with CARLA-VR improve displacement error and collision rate by 10.7% and 4.9%, respectively, and are more robust in rare vehicle-pedestrian scenarios.
Neural Relational Inference with Fast Modular Meta-learning
Oct 10, 2023\textit{Graph neural networks} (GNNs) are effective models for many dynamical systems consisting of entities and relations. Although most GNN applications assume a single type of entity and relation, many situations involve multiple types of interactions. \textit{Relational inference} is the problem of inferring these interactions and learning the dynamics from observational data. We frame relational inference as a \textit{modular meta-learning} problem, where neural modules are trained to be composed in different ways to solve many tasks. This meta-learning framework allows us to implicitly encode time invariance and infer relations in context of one another rather than independently, which increases inference capacity. Framing inference as the inner-loop optimization of meta-learning leads to a model-based approach that is more data-efficient and capable of estimating the state of entities that we do not observe directly, but whose existence can be inferred from their effect on observed entities. To address the large search space of graph neural network compositions, we meta-learn a \textit{proposal function} that speeds up the inner-loop simulated annealing search within the modular meta-learning algorithm, providing two orders of magnitude increase in the size of problems that can be addressed.
Joint Metrics Matter: A Better Standard for Trajectory Forecasting
May 10, 2023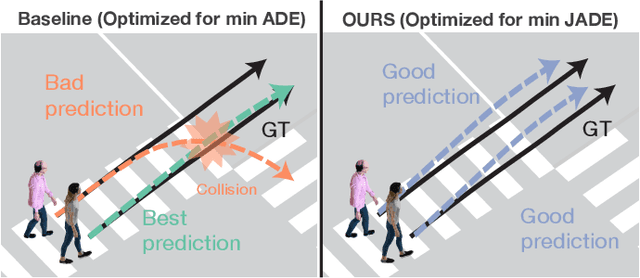
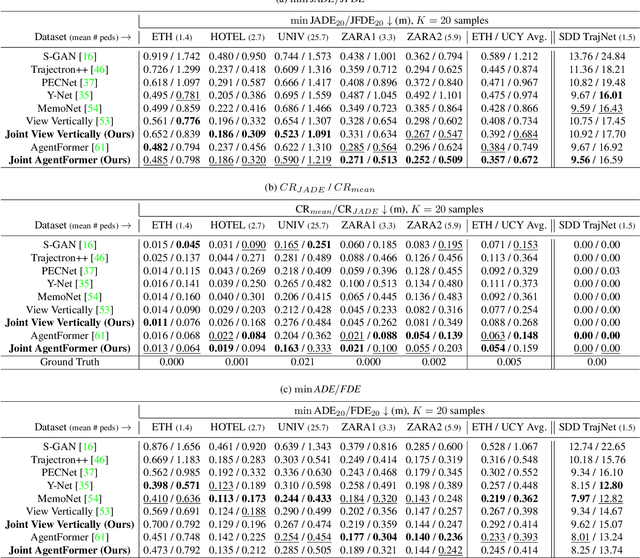
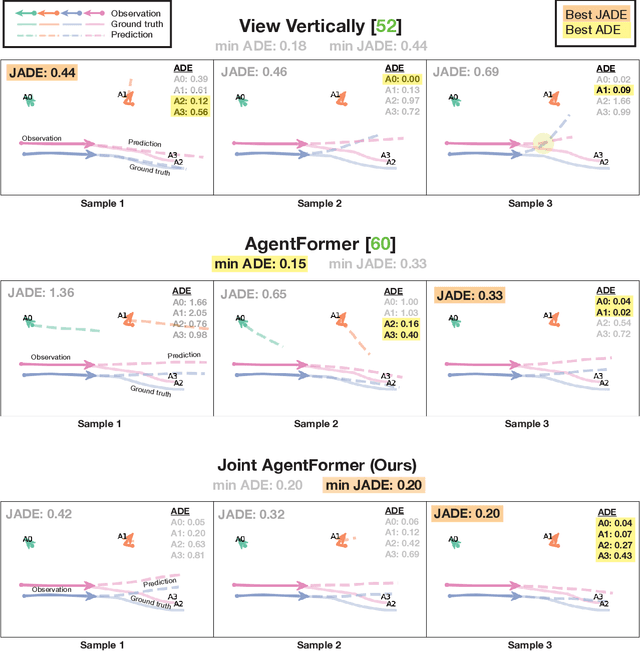
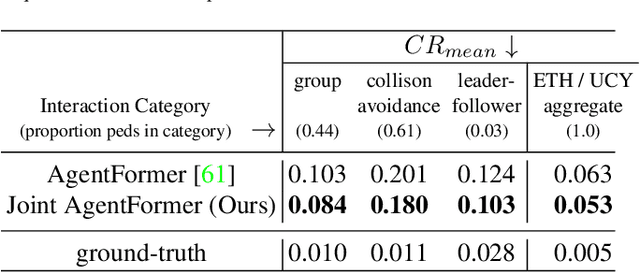
Multi-modal trajectory forecasting methods commonly evaluate using single-agent metrics (marginal metrics), such as minimum Average Displacement Error (ADE) and Final Displacement Error (FDE), which fail to capture joint performance of multiple interacting agents. Only focusing on marginal metrics can lead to unnatural predictions, such as colliding trajectories or diverging trajectories for people who are clearly walking together as a group. Consequently, methods optimized for marginal metrics lead to overly-optimistic estimations of performance, which is detrimental to progress in trajectory forecasting research. In response to the limitations of marginal metrics, we present the first comprehensive evaluation of state-of-the-art (SOTA) trajectory forecasting methods with respect to multi-agent metrics (joint metrics): JADE, JFDE, and collision rate. We demonstrate the importance of joint metrics as opposed to marginal metrics with quantitative evidence and qualitative examples drawn from the ETH / UCY and Stanford Drone datasets. We introduce a new loss function incorporating joint metrics that, when applied to a SOTA trajectory forecasting method, achieves a 7% improvement in JADE / JFDE on the ETH / UCY datasets with respect to the previous SOTA. Our results also indicate that optimizing for joint metrics naturally leads to an improvement in interaction modeling, as evidenced by a 16% decrease in mean collision rate on the ETH / UCY datasets with respect to the previous SOTA.