 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Metrics Matter: A Better Standard for Trajectory Forecasting
Paper and Code
May 10, 2023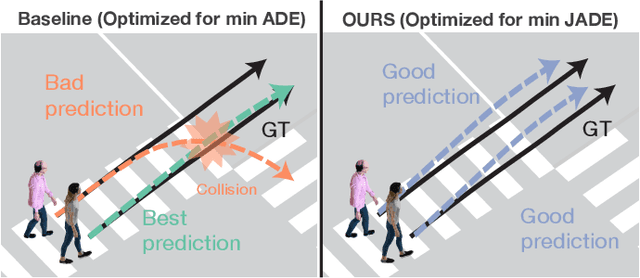
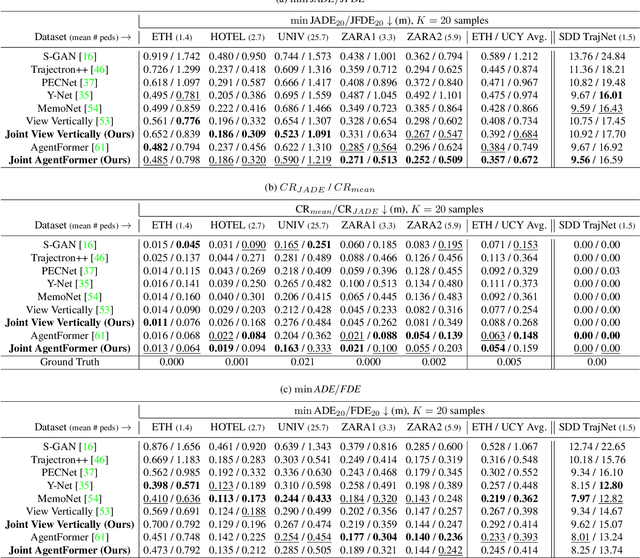
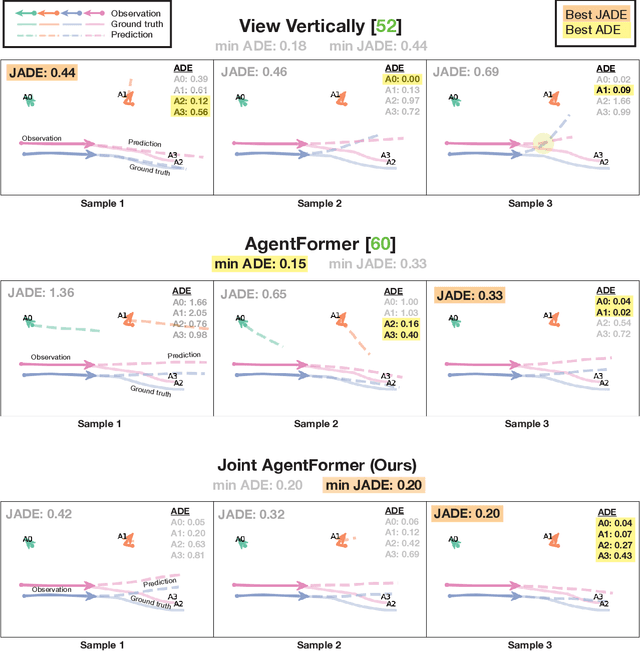
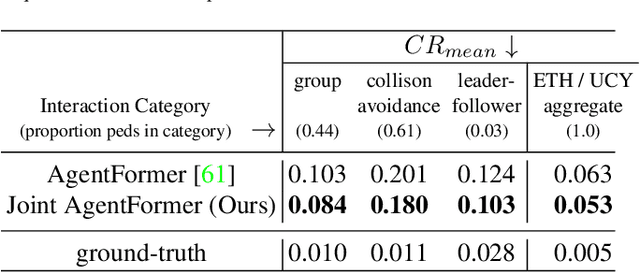
Multi-modal trajectory forecasting methods commonly evaluate using single-agent metrics (marginal metrics), such as minimum Average Displacement Error (ADE) and Final Displacement Error (FDE), which fail to capture joint performance of multiple interacting agents. Only focusing on marginal metrics can lead to unnatural predictions, such as colliding trajectories or diverging trajectories for people who are clearly walking together as a group. Consequently, methods optimized for marginal metrics lead to overly-optimistic estimations of performance, which is detrimental to progress in trajectory forecasting research. In response to the limitations of marginal metrics, we present the first comprehensive evaluation of state-of-the-art (SOTA) trajectory forecasting methods with respect to multi-agent metrics (joint metrics): JADE, JFDE, and collision rate. We demonstrate the importance of joint metrics as opposed to marginal metrics with quantitative evidence and qualitative examples drawn from the ETH / UCY and Stanford Drone datasets. We introduce a new loss function incorporating joint metrics that, when applied to a SOTA trajectory forecasting method, achieves a 7% improvement in JADE / JFDE on the ETH / UCY datasets with respect to the previous SOTA. Our results also indicate that optimizing for joint metrics naturally leads to an improvement in interaction modeling, as evidenced by a 16% decrease in mean collision rate on the ETH / UCY datasets with respect to the previous SOTA.