 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEcoSense: Energy-Efficient Intelligent Sensing for In-Shore Ship Detection through Edge-Cloud Collaboration
Mar 26, 2024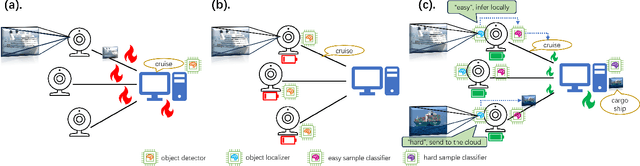

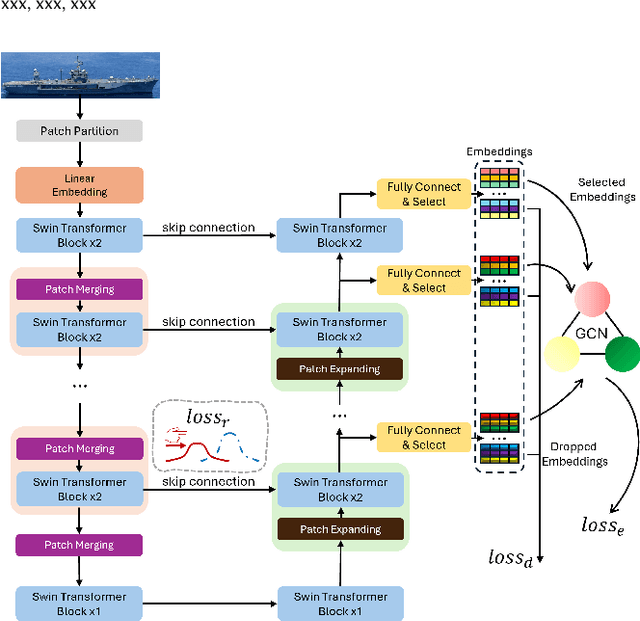
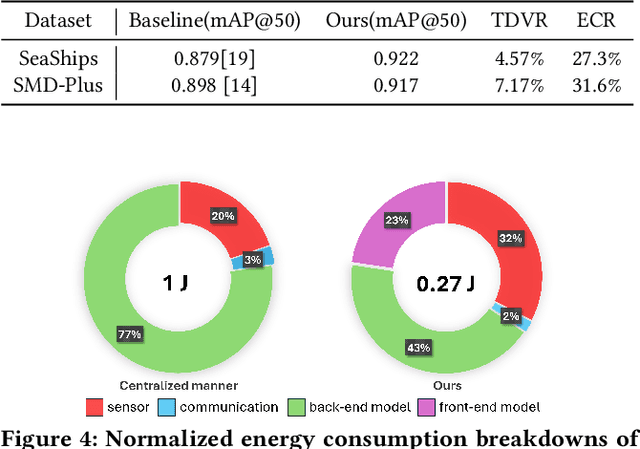
Detecting marine objects inshore presents challenges owing to algorithmic intricacies and complexities in system deployment. We propose a difficulty-aware edge-cloud collaborative sensing system that splits the task into object localization and fine-grained classification. Objects are classified either at the edge or within the cloud, based on their estimated difficulty. The framework comprises a low-power device-tailored front-end model for object localization, classification, and difficulty estimation, along with a transformer-graph convolutional network-based back-end model for fine-grained classification. Our system demonstrates superior performance (mAP@0.5 +4.3%}) on widely used marine object detection datasets, significantly reducing both data transmission volume (by 95.43%) and energy consumption (by 72.7%}) at the system level. We validate the proposed system across various embedded system platforms and in real-world scenarios involving drone deployment.