 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Binary and Multiclass SVMs Trained on a Quantum Annealer
Mar 13, 2024



Support vector machines (SVMs) are widely used machine learning models (e.g., in remote sensing), with formulations for both classification and regression tasks. In the last years, with the advent of working quantum annealers, hybrid SVM models characterised by quantum training and classical execution have been introduced. These models have demonstrated comparable performance to their classical counterparts. However, they are limited in the training set size due to the restricted connectivity of the current quantum annealers. Hence, to take advantage of large datasets (like those related to Earth observation), a strategy is required. In the classical domain, local SVMs, namely, SVMs trained on the data samples selected by a k-nearest neighbors model, have already proven successful. Here, the local application of quantum-trained SVM models is proposed and empirically assessed. In particular, this approach allows overcoming the constraints on the training set size of the quantum-trained models while enhancing their performance. In practice, the FaLK-SVM method, designed for efficient local SVMs, has been combined with quantum-trained SVM models for binary and multiclass classification. In addition, for comparison, FaLK-SVM has been interfaced for the first time with a classical single-step multiclass SVM model (CS SVM). Concerning the empirical evaluation, D-Wave's quantum annealers and real-world datasets taken from the remote sensing domain have been employed. The results have shown the effectiveness and scalability of the proposed approach, but also its practical applicability in a real-world large-scale scenario.
A general learning scheme for classical and quantum Ising machines
Oct 27, 2023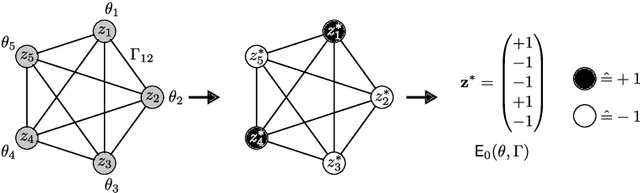
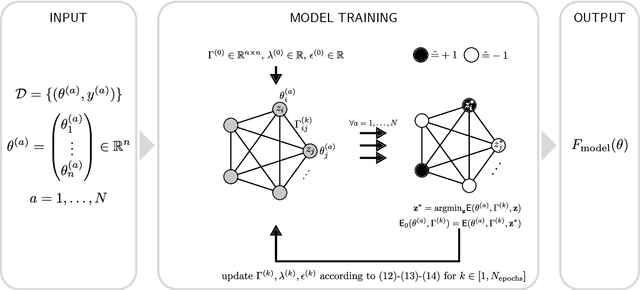
An Ising machine is any hardware specifically designed for finding the ground state of the Ising model. Relevant examples are coherent Ising machines and quantum annealers. In this paper, we propose a new machine learning model that is based on the Ising structure and can be efficiently trained using gradient descent. We provide a mathematical characterization of the training process, which is based upon optimizing a loss function whose partial derivatives are not explicitly calculated but estimated by the Ising machine itself. Moreover, we present some experimental results on the training and execution of the proposed learning model. These results point out new possibilities offered by Ising machines for different learning tasks. In particular, in the quantum realm, the quantum resources are used for both the execution and the training of the model, providing a promising perspective in quantum machine learning.
Seeking Quality Diversity in Evolutionary Co-design of Morphology and Control of Soft Tensegrity Modular Robots
Apr 25, 2021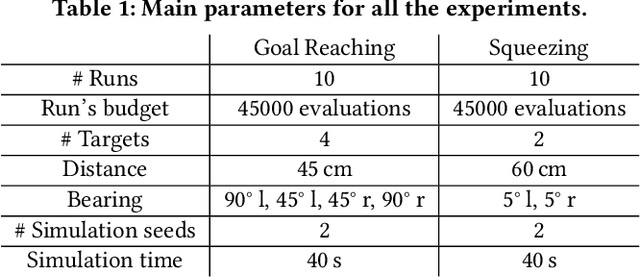
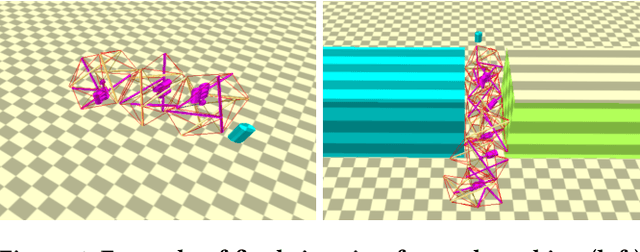
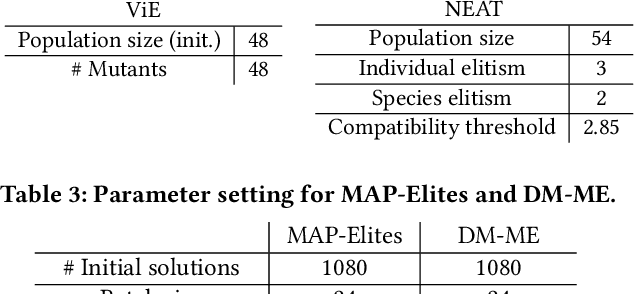
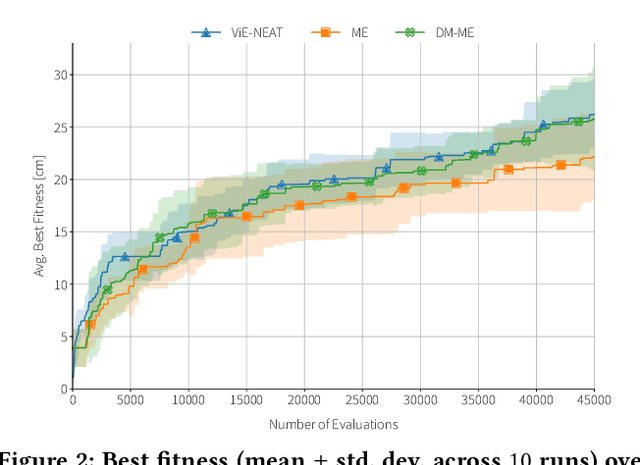
Designing optimal soft modular robots is difficult, due to non-trivial interactions between morphology and controller. Evolutionary algorithms (EAs), combined with physical simulators, represent a valid tool to overcome this issue. In this work, we investigate algorithmic solutions to improve the Quality Diversity of co-evolved designs of Tensegrity Soft Modular Robots (TSMRs) for two robotic tasks, namely goal reaching and squeezing trough a narrow passage. To this aim, we use three different EAs, i.e., MAP-Elites and two custom algorithms: one based on Viability Evolution (ViE) and NEAT (ViE-NEAT), the other named Double Map MAP-Elites (DM-ME) and devised to seek diversity while co-evolving robot morphologies and neural network (NN)-based controllers. In detail, DM-ME extends MAP-Elites in that it uses two distinct feature maps, referring to morphologies and controllers respectively, and integrates a mechanism to automatically define the NN-related feature descriptor. Considering the fitness, in the goal-reaching task ViE-NEAT outperforms MAP-Elites and results equivalent to DM-ME. Instead, when considering diversity in terms of "illumination" of the feature space, DM-ME outperforms the other two algorithms on both tasks, providing a richer pool of possible robotic designs, whereas ViE-NEAT shows comparable performance to MAP-Elites on goal reaching, although it does not exploit any map.