 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeeking Quality Diversity in Evolutionary Co-design of Morphology and Control of Soft Tensegrity Modular Robots
Paper and Code
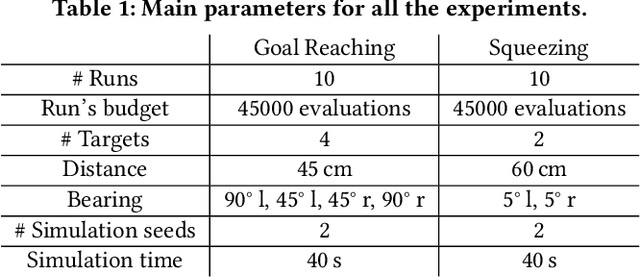
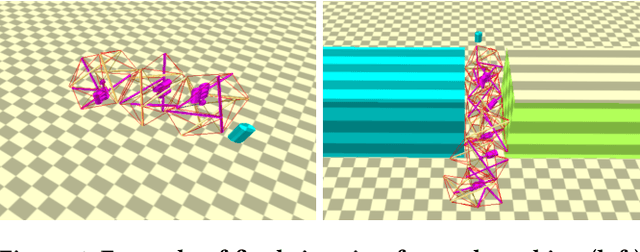
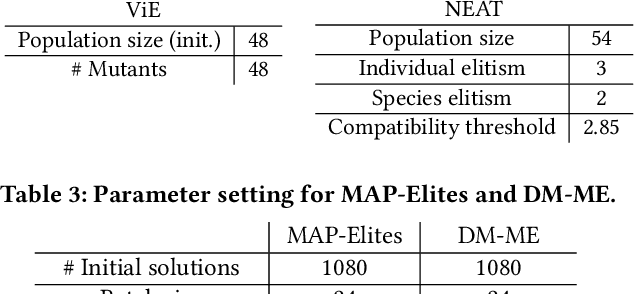
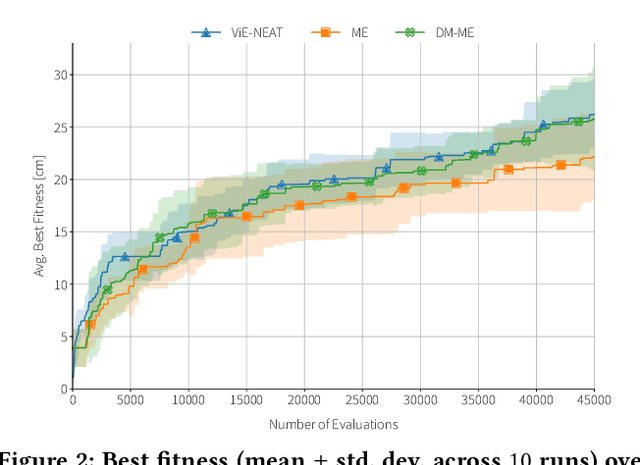
Designing optimal soft modular robots is difficult, due to non-trivial interactions between morphology and controller. Evolutionary algorithms (EAs), combined with physical simulators, represent a valid tool to overcome this issue. In this work, we investigate algorithmic solutions to improve the Quality Diversity of co-evolved designs of Tensegrity Soft Modular Robots (TSMRs) for two robotic tasks, namely goal reaching and squeezing trough a narrow passage. To this aim, we use three different EAs, i.e., MAP-Elites and two custom algorithms: one based on Viability Evolution (ViE) and NEAT (ViE-NEAT), the other named Double Map MAP-Elites (DM-ME) and devised to seek diversity while co-evolving robot morphologies and neural network (NN)-based controllers. In detail, DM-ME extends MAP-Elites in that it uses two distinct feature maps, referring to morphologies and controllers respectively, and integrates a mechanism to automatically define the NN-related feature descriptor. Considering the fitness, in the goal-reaching task ViE-NEAT outperforms MAP-Elites and results equivalent to DM-ME. Instead, when considering diversity in terms of "illumination" of the feature space, DM-ME outperforms the other two algorithms on both tasks, providing a richer pool of possible robotic designs, whereas ViE-NEAT shows comparable performance to MAP-Elites on goal reaching, although it does not exploit any map.