 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensorimotor Control Strategies for Tactile Robotics
Jan 16, 2025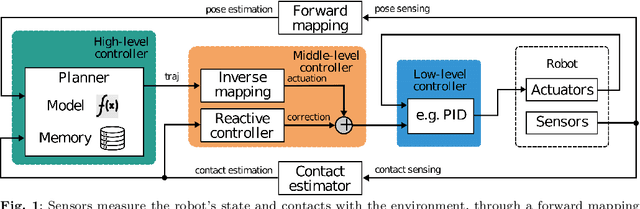
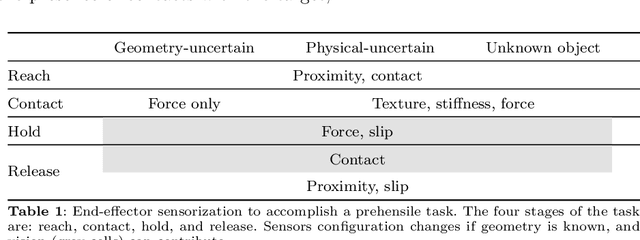
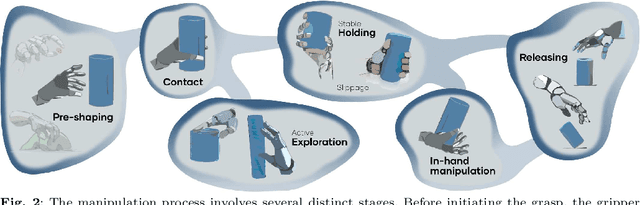
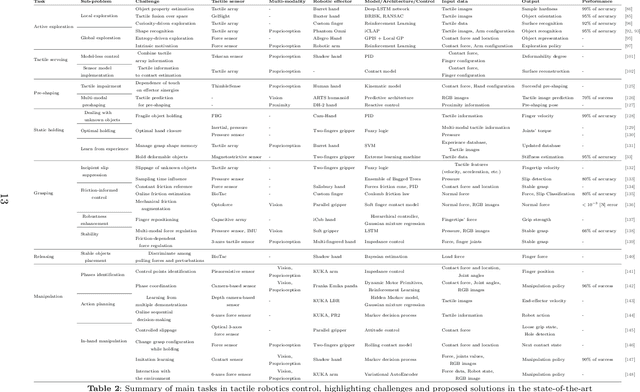
How are robots becoming smarter at interacting with their surroundings? Recent advances have reshaped how robots use tactile sensing to perceive and engage with the world. Tactile sensing is a game-changer, allowing robots to embed sensorimotor control strategies to interact with complex environments and skillfully handle heterogeneous objects. Such control frameworks plan contact-driven motions while staying responsive to sudden changes. We review the latest methods for building perception and control systems in tactile robotics while offering practical guidelines for their design and implementation. We also address key challenges to shape the future of intelligent robots.
Towards Interpretable Visuo-Tactile Predictive Models for Soft Robot Interactions
Jul 16, 2024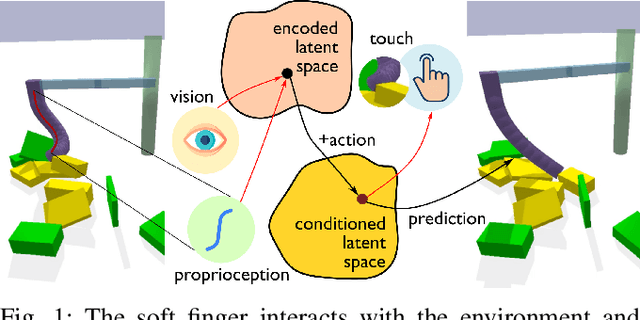
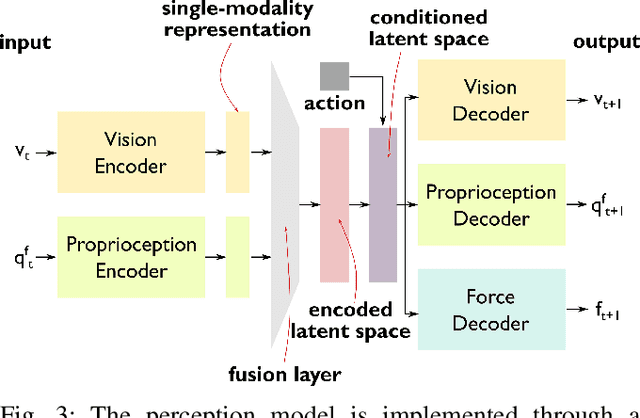
Autonomous systems face the intricate challenge of navigating unpredictable environments and interacting with external objects. The successful integration of robotic agents into real-world situations hinges on their perception capabilities, which involve amalgamating world models and predictive skills. Effective perception models build upon the fusion of various sensory modalities to probe the surroundings. Deep learning applied to raw sensory modalities offers a viable option. However, learning-based perceptive representations become difficult to interpret. This challenge is particularly pronounced in soft robots, where the compliance of structures and materials makes prediction even harder. Our work addresses this complexity by harnessing a generative model to construct a multi-modal perception model for soft robots and to leverage proprioceptive and visual information to anticipate and interpret contact interactions with external objects. A suite of tools to interpret the perception model is furnished, shedding light on the fusion and prediction processes across multiple sensory inputs after the learning phase. We will delve into the outlooks of the perception model and its implications for control purposes.
Multi-modal perception for soft robotic interactions using generative models
Apr 05, 2024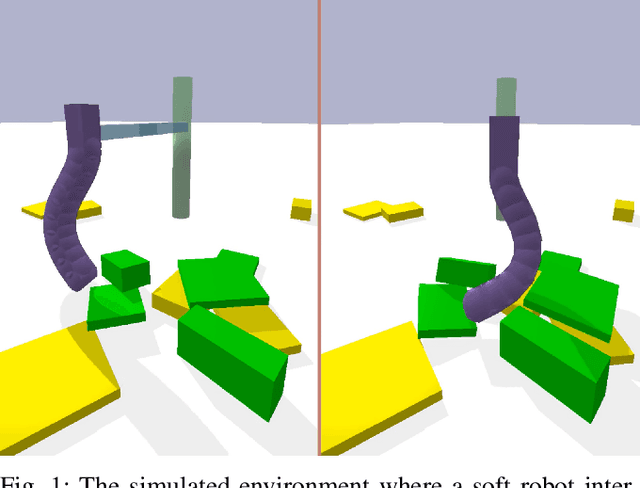
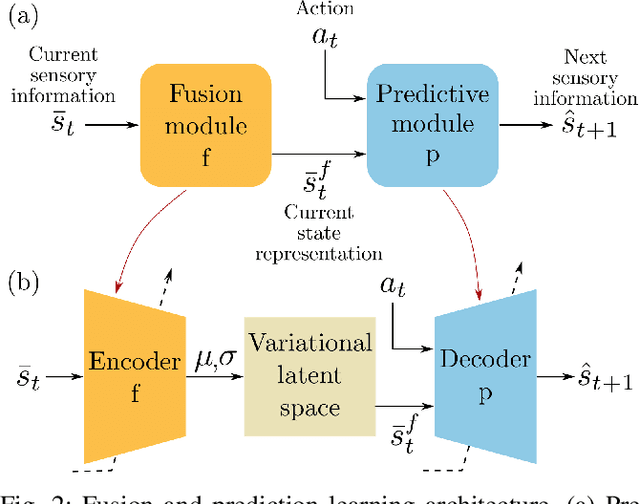
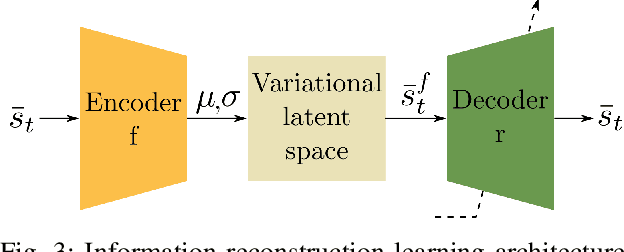
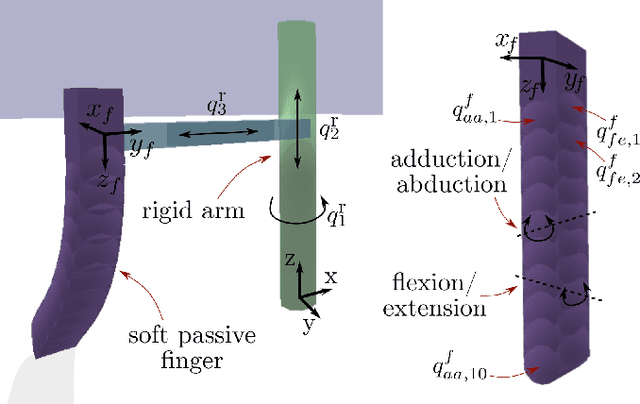
Perception is essential for the active interaction of physical agents with the external environment. The integration of multiple sensory modalities, such as touch and vision, enhances this perceptual process, creating a more comprehensive and robust understanding of the world. Such fusion is particularly useful for highly deformable bodies such as soft robots. Developing a compact, yet comprehensive state representation from multi-sensory inputs can pave the way for the development of complex control strategies. This paper introduces a perception model that harmonizes data from diverse modalities to build a holistic state representation and assimilate essential information. The model relies on the causality between sensory input and robotic actions, employing a generative model to efficiently compress fused information and predict the next observation. We present, for the first time, a study on how touch can be predicted from vision and proprioception on soft robots, the importance of the cross-modal generation and why this is essential for soft robotic interactions in unstructured environments.
Continual Policy Distillation of Reinforcement Learning-based Controllers for Soft Robotic In-Hand Manipulation
Apr 05, 2024Dexterous manipulation, often facilitated by multi-fingered robotic hands, holds solid impact for real-world applications. Soft robotic hands, due to their compliant nature, offer flexibility and adaptability during object grasping and manipulation. Yet, benefits come with challenges, particularly in the control development for finger coordination. Reinforcement Learning (RL) can be employed to train object-specific in-hand manipulation policies, but limiting adaptability and generalizability. We introduce a Continual Policy Distillation (CPD) framework to acquire a versatile controller for in-hand manipulation, to rotate different objects in shape and size within a four-fingered soft gripper. The framework leverages Policy Distillation (PD) to transfer knowledge from expert policies to a continually evolving student policy network. Exemplar-based rehearsal methods are then integrated to mitigate catastrophic forgetting and enhance generalization. The performance of the CPD framework over various replay strategies demonstrates its effectiveness in consolidating knowledge from multiple experts and achieving versatile and adaptive behaviours for in-hand manipulation tasks.
Plant-inspired behavior-based controller to enable reaching in redundant continuum robot arms
Apr 14, 2023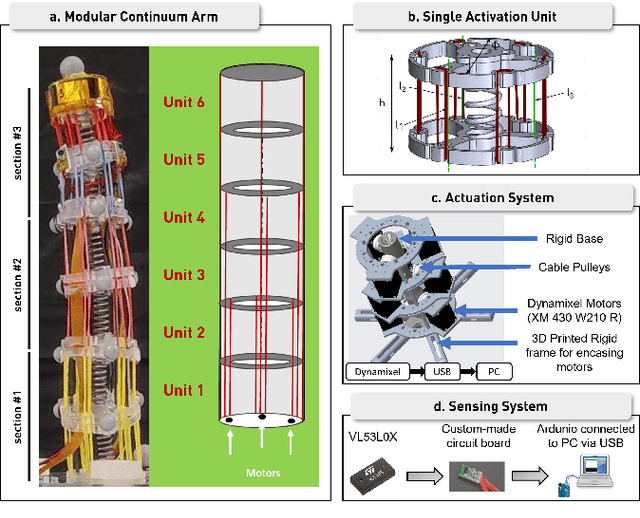
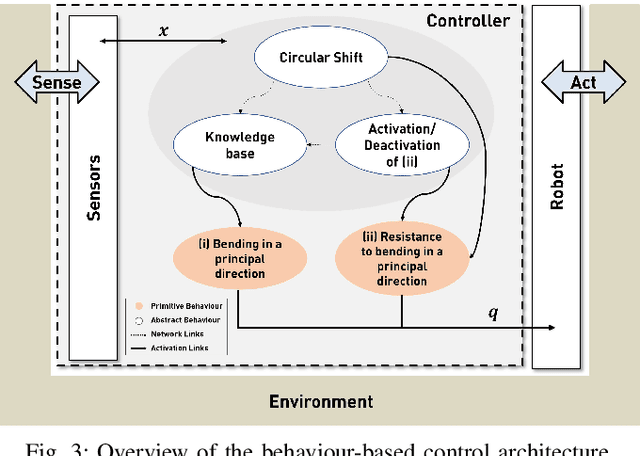
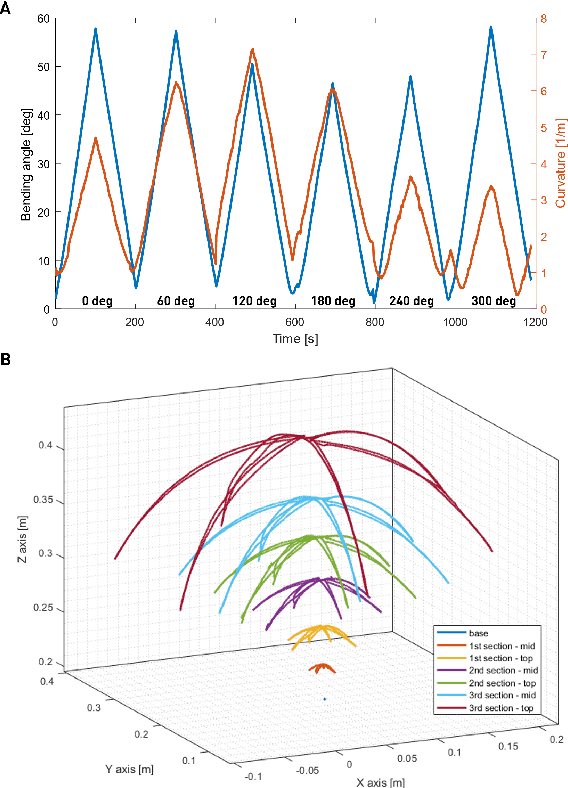
Enabling reaching capabilities in highly redundant continuum robot arms is an active area of research. Existing solutions comprise of task-space controllers, whose proper functioning is still limited to laboratory environments. In contrast, this work proposes a novel plant-inspired behaviour-based controller that exploits information obtained from proximity sensing embedded near the end-effector to move towards a desired spatial target. The controller is tested on a 9-DoF modular cable-driven continuum arm for reaching multiple setpoints in space. The results are promising for the deployability of these systems into unstructured environments.