Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlant-inspired behavior-based controller to enable reaching in redundant continuum robot arms
Paper and Code
Apr 14, 2023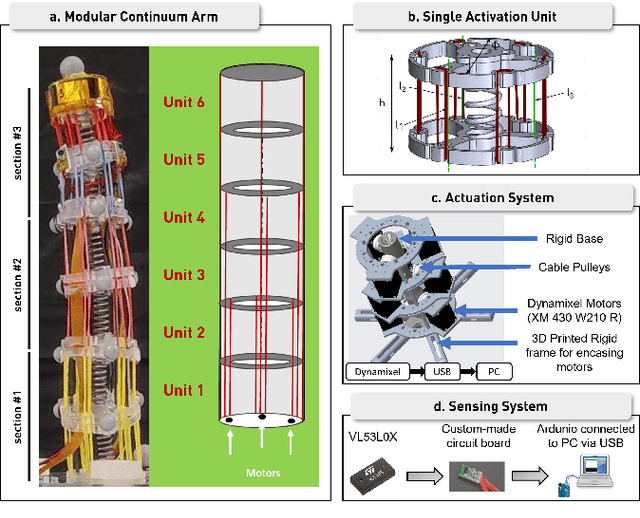
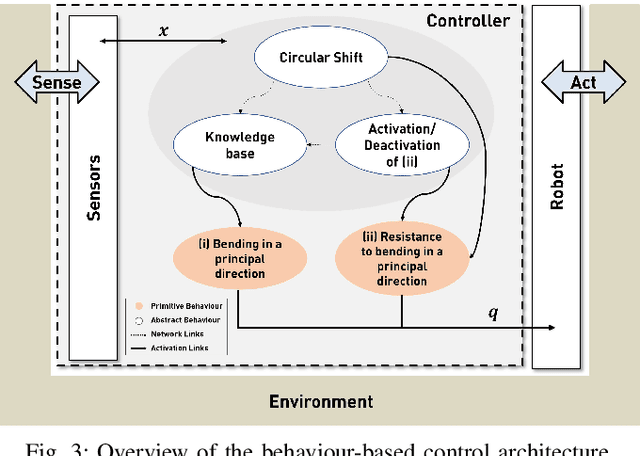
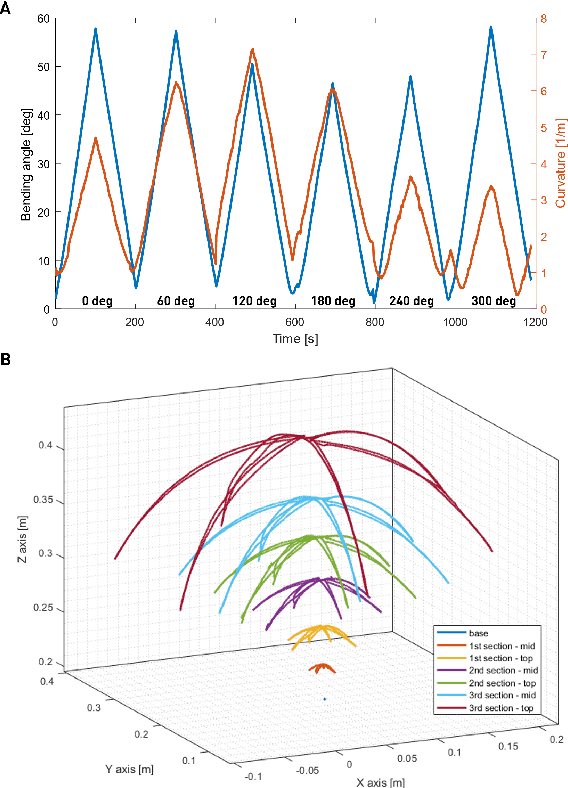
Enabling reaching capabilities in highly redundant continuum robot arms is an active area of research. Existing solutions comprise of task-space controllers, whose proper functioning is still limited to laboratory environments. In contrast, this work proposes a novel plant-inspired behaviour-based controller that exploits information obtained from proximity sensing embedded near the end-effector to move towards a desired spatial target. The controller is tested on a 9-DoF modular cable-driven continuum arm for reaching multiple setpoints in space. The results are promising for the deployability of these systems into unstructured environments.
* Accepted at IEEE-RAS RoboSoft 2023
View paper on