 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Event-Based Opto-Tactile Skin
Jan 07, 2026This paper presents a neuromorphic, event-driven tactile sensing system for soft, large-area skin, based on the Dynamic Vision Sensors (DVS) integrated with a flexible silicone optical waveguide skin. Instead of repetitively scanning embedded photoreceivers, this design uses a stereo vision setup comprising two DVS cameras looking sideways through the skin. Such a design produces events as changes in brightness are detected, and estimates press positions on the 2D skin surface through triangulation, utilizing Density-Based Spatial Clustering of Applications with Noise (DBSCAN) to find the center of mass of contact events resulting from pressing actions. The system is evaluated over a 4620 mm2 probed area of the skin using a meander raster scan. Across 95 % of the presses visible to both cameras, the press localization achieved a Root-Mean-Squared Error (RMSE) of 4.66 mm. The results highlight the potential of this approach for wide-area flexible and responsive tactile sensors in soft robotics and interactive environments. Moreover, we examined how the system performs when the amount of event data is strongly reduced. Using stochastic down-sampling, the event stream was reduced to 1/1024 of its original size. Under this extreme reduction, the average localization error increased only slightly (from 4.66 mm to 9.33 mm), and the system still produced valid press localizations for 85 % of the trials. This reduction in pass rate is expected, as some presses no longer produce enough events to form a reliable cluster for triangulation. These results show that the sensing approach remains functional even with very sparse event data, which is promising for reducing power consumption and computational load in future implementations. The system exhibits a detection latency distribution with a characteristic width of 31 ms.
Monolithic Units: Actuation, Sensing, and Simulation for Integrated Soft Robot Design
Nov 17, 2025This work introduces the Monolithic Unit (MU), an actuator-lattice-sensor building block for soft robotics. The MU integrates pneumatic actuation, a compliant lattice envelope, and candidate sites for optical waveguide sensing into a single printed body. In order to study reproducibility and scalability, a parametric design framework establishes deterministic rules linking actuator chamber dimensions to lattice unit cell size. Experimental homogenization of lattice specimens provides effective material properties for finite element simulation. Within this simulation environment, sensor placement is treated as a discrete optimization problem, where a finite set of candidate waveguide paths derived from lattice nodes is evaluated by introducing local stiffening, and the configuration minimizing deviation from baseline mechanical response is selected. Optimized models are fabricated and experimentally characterized, validating the preservation of mechanical performance while enabling embedded sensing. The workflow is further extended to scaled units and a two-finger gripper, demonstrating generality of the MU concept. This approach advances monolithic soft robotic design by combining reproducible co-design rules with simulation-informed sensor integration.
Neural Cellular Automata for Decentralized Sensing using a Soft Inductive Sensor Array for Distributed Manipulator Systems
Feb 03, 2025In Distributed Manipulator Systems (DMS), decentralization is a highly desirable property as it promotes robustness and facilitates scalability by distributing computational burden and eliminating singular points of failure. However, current DMS typically utilize a centralized approach to sensing, such as single-camera computer vision systems. This centralization poses a risk to system reliability and offers a significant limiting factor to system size. In this work, we introduce a decentralized approach for sensing and in a Distributed Manipulator Systems using Neural Cellular Automata (NCA). Demonstrating a decentralized sensing in a hardware implementation, we present a novel inductive sensor board designed for distributed sensing and evaluate its ability to estimate global object properties, such as the geometric center, through local interactions and computations. Experiments demonstrate that NCA-based sensing networks accurately estimate object position at 0.24 times the inter sensor distance. They maintain resilience under sensor faults and noise, and scale seamlessly across varying network sizes. These findings underscore the potential of local, decentralized computations to enable scalable, fault-tolerant, and noise-resilient object property estimation in DMS
Sensorimotor Control Strategies for Tactile Robotics
Jan 16, 2025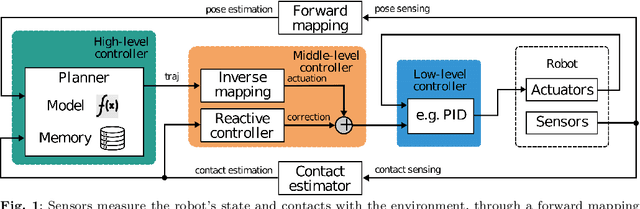
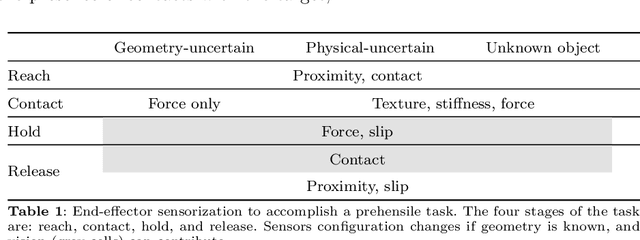
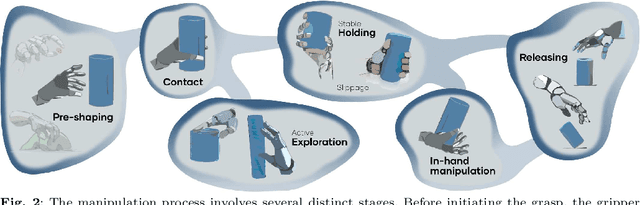
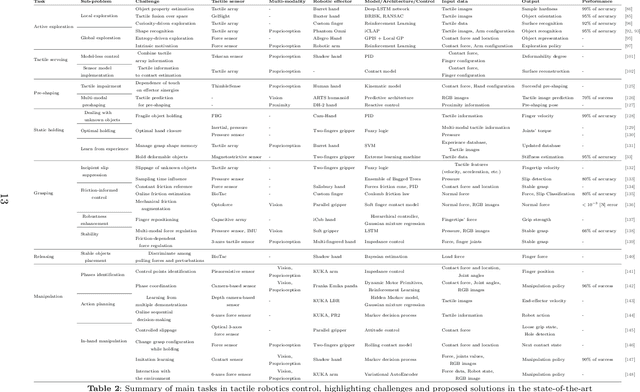
How are robots becoming smarter at interacting with their surroundings? Recent advances have reshaped how robots use tactile sensing to perceive and engage with the world. Tactile sensing is a game-changer, allowing robots to embed sensorimotor control strategies to interact with complex environments and skillfully handle heterogeneous objects. Such control frameworks plan contact-driven motions while staying responsive to sudden changes. We review the latest methods for building perception and control systems in tactile robotics while offering practical guidelines for their design and implementation. We also address key challenges to shape the future of intelligent robots.