 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAMC26: High-performance DOb for robust position control
Jan 05, 2026This paper presents a new HPDOb that significantly improves disturbance estimation accuracy and robustness in motion control systems, surpassing the capabilities of conventional DObs. The proposed observer is analysed and synthesised in the discrete-time domain, providing a realistic representation of their dynamic behaviour and enabling enhanced controller design for practical applications. The core contribution of the HPDOb is a novel synthesis method that incorporates higher-order truncation error dynamics into disturbance estimation. Unlike conventional DObs, which are limited to zero-order truncation error, the HPDOb achieves first-order truncation error, yielding markedly improved estimation accuracy and robustness against disturbances in motion control systems. Simulation and experiments verify the stability and performance of HPDOb.
Variable Stiffness Improves Safety and Performance in Soft Robotics
Feb 06, 2023This paper proposes a new variable stiffness soft gripper that enables high-performance grasping tasks in industrial applications. The design of the proposed monolithic soft gripper includes a middle bellow and two side bellows (i.e., fingers). The positions of the fingers are regulated by adjusting the negative pressure in the middle bellow actuator via an on-off controller. The stiffness of the soft gripper is modulated by controlling the positive pressure in the fingers through the use of a proportional air-pressure regulator. It is experimentally shown that the proposed soft gripper can modulate its stiffness by 125% within 250ms. It is also shown that the variable stiffness soft gripper can help improve the safety and performance of grasping tasks in industrial applications.
Design and Control of a Novel Variable Stiffness Series Elastic Actuator
Jan 03, 2023



This paper expounds the design and control of a new Variable Stiffness Series Elastic Actuator (VSSEA). It is established by employing a modular mechanical design approach that allows us to effectively optimise the stiffness modulation characteristics and power density of the actuator. The proposed VSSEA possesses the following features: i) no limitation in the work-range of output link, ii) a wide range of stiffness modulation (~20Nm/rad to ~1KNm/rad), iii) low-energy-cost stiffness modulation at equilibrium and non-equilibrium positions, iv) compact design and high torque density (~36Nm/kg), and v) high-speed stiffness modulation (~3000Nm/rad/s). Such features can help boost the safety and performance of many advanced robotic systems, e.g., a cobot that physically interacts with unstructured environments and an exoskeleton that provides physical assistance to human users. These features can also enable us to utilise variable stiffness property to attain various regulation and trajectory tracking control tasks only by employing conventional controllers, eliminating the need for synthesising complex motion control systems in compliant actuation. To this end, it is experimentally demonstrated that the proposed VSSEA is capable of precisely tracking desired position and force control references through the use of conventional Proportional-Integral-Derivative (PID) controllers.
* IEEE/ASME TRANSACTIONS ON MECHATRONICS
A Unified Robust Motion Controller Synthesis for Compliant Robots Driven by Series Elastic Actuators
Feb 01, 2022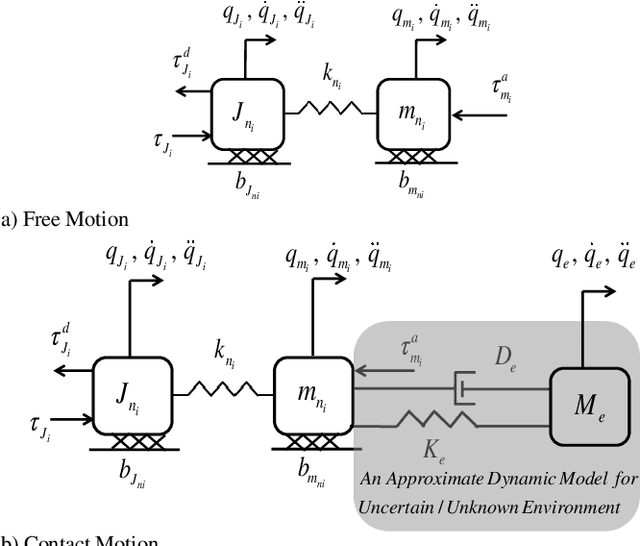

This paper proposes a unified robust motion controller for the position and force control problems of compliant robot manipulators driven by Series Elastic Actuators (SEAs). It is shown that the dynamic model of the compliant robot includes not only matched but also mismatched disturbances that act on the system through a different channel from the control input. To tackle this complex robust control problem, the unified robust motion controller is synthesised by employing a second-order Disturbance Observer (DOb), which allows us to estimate not only disturbances but also their first and second order derivatives, and a novel controller design approach in state space. By using the Brunovsky canonical form transformation and the estimations of disturbances and their first and second order derivatives, the dynamic model of the robot is reconstructed so that a new system model that includes only matched disturbances is obtained for compliant robots driven by SEAs. The robust position and force controllers are simply designed by eliminating the matched disturbances of the reconstructed system model via the conventional DOb-based robust control method. The stability and performance of the proposed robust motion controllers are verified by simulations.
Stability and Robustness of the Disturbance Observer-based Motion Control Systems in Discrete-Time Domain
Oct 16, 2020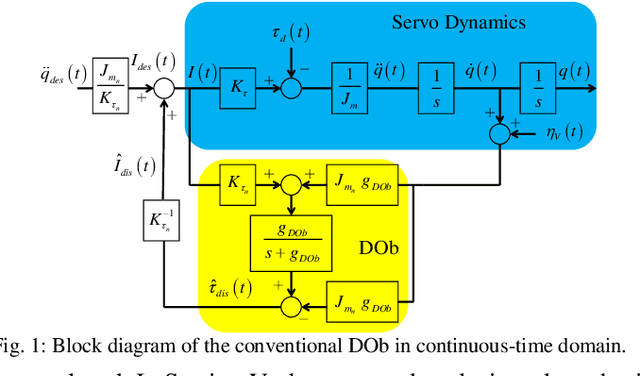
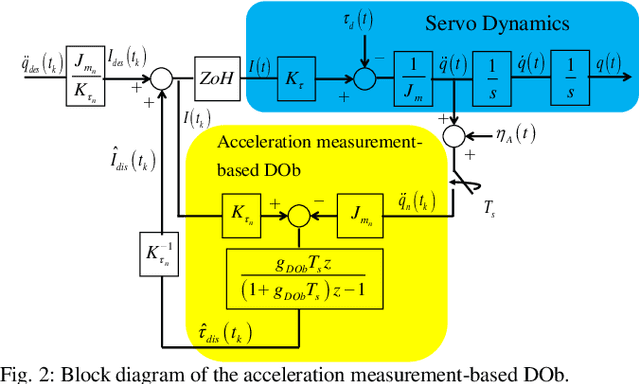
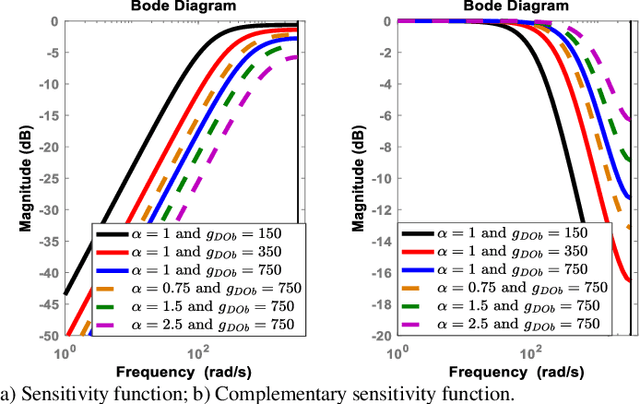
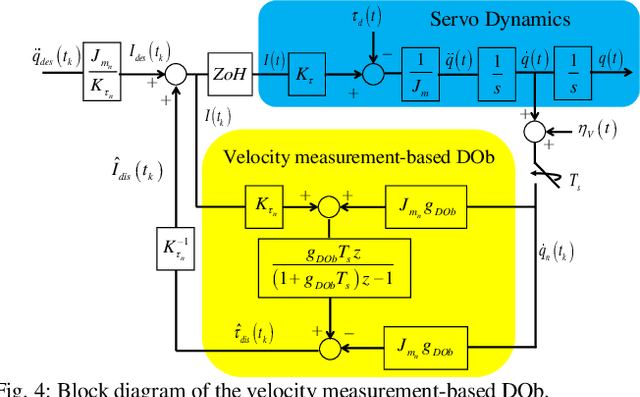
This paper analyses the robust stability and performance of the Disturbance Observer- (DOb-) based digital motion control systems in discrete-time domain. It is shown that the phase margin and the robustness of the digital motion controller can be directly adjusted by tuning the nominal plant model and the bandwidth of the observer. However, they have upper and lower bounds due to robust stability and performance constraints as well as noise-sensitivity. The constraints on the design parameters of the DOb change when the digital motion controller is synthesised by measuring different states of a servo system. For example, the bandwidth of the DOb is limited by noise-sensitivity and waterbed effect when velocity and position measurements are employed in the digital robust motion controller synthesis. The robustness constraint due to the waterbed effect is removed when the DOb is implemented by acceleration measurement. The design constraints on the nominal plant model and the bandwidth of the observer are analytically derived by employing the generalised Bode Integral Theorem in discrete-time. The proposed design constraints allow one to systematically synthesise a high-performance DOb-based digital robust motion controller. Experimental results are given to verify the proposed analysis and synthesis methods.
* 11 pages, 17 figures
A Sliding Mode Force and Position Controller Synthesis for Series Elastic Actuators
Mar 13, 2019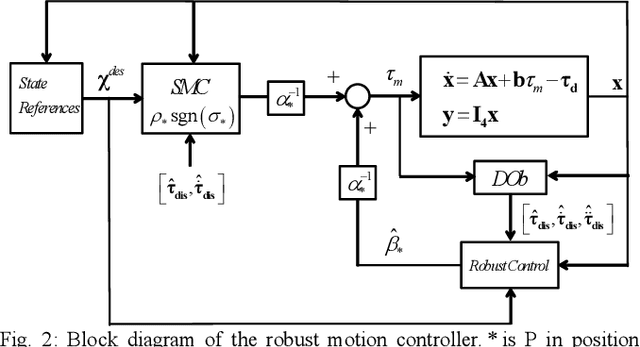
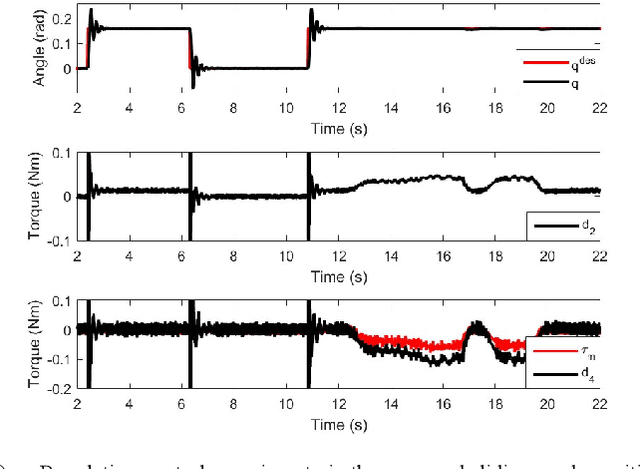
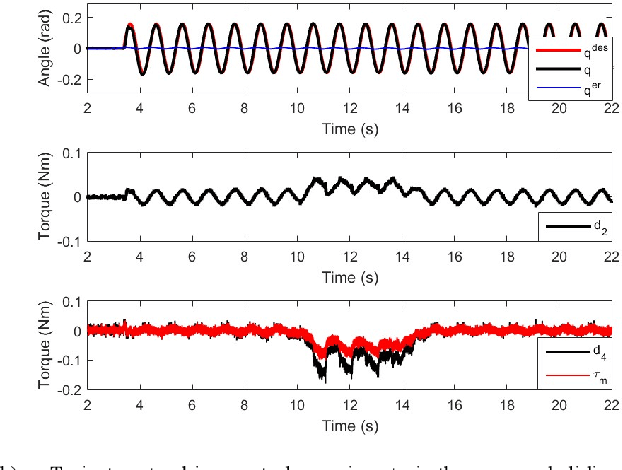
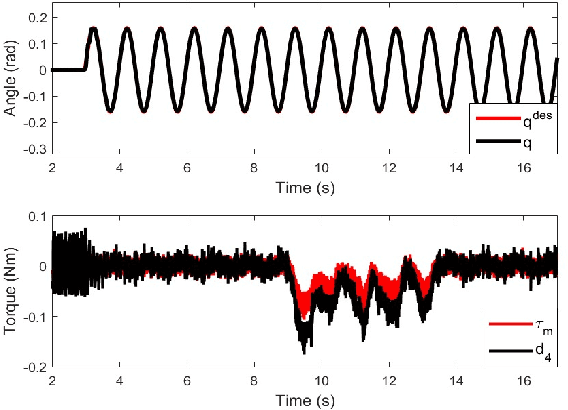
This paper deals with the robust force and position control problems of Series Elastic Actuators. It is shown that a Series Elastic Actuator's force control problem can be described by a second-order dynamic model which suffers from only matched disturbances. However, the position control dynamics of a Series Elastic Actuator is of fourth-order and includes matched and mismatched disturbances. In other words, a Series Elastic Actuator's position control is more complicated than its force control, particularly when disturbances are considered. A novel robust motion controller is proposed for Series Elastic Actuators by using Disturbance Observer and Sliding Mode Control. When the proposed robust motion controller is implemented, a Series Elastic Actuator can precisely track desired trajectories and safely contact with an unknown and dynamic environment. The proposed motion controller does not require precise dynamic models of the actuator and environment. Therefore, it can be applied to many different advanced robotic systems such as compliant humanoids and exoskeletons. The validity of the motion controller is experimentally verified.
A Stability Analysis for the Acceleration-based Robust Position Control of Robot Manipulators via Disturbance Observer
Feb 20, 2019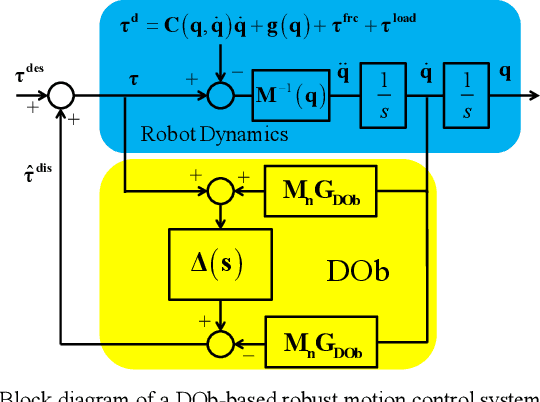
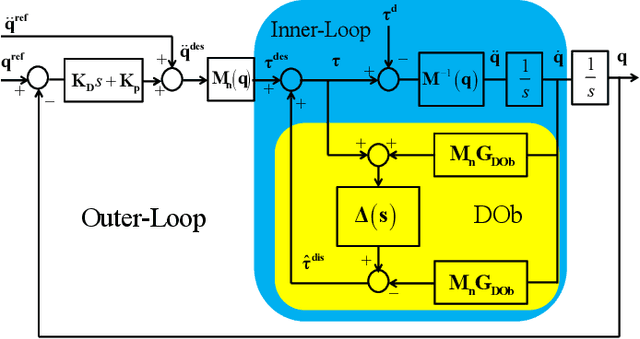
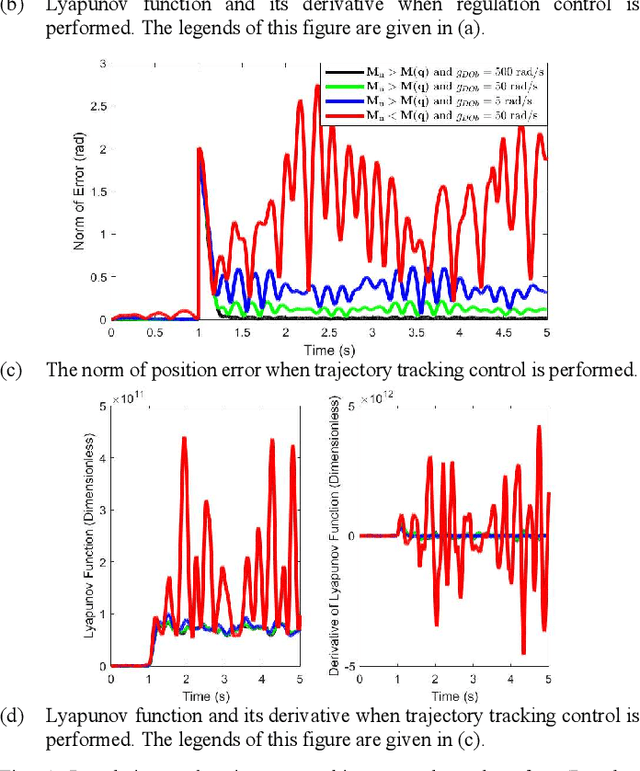
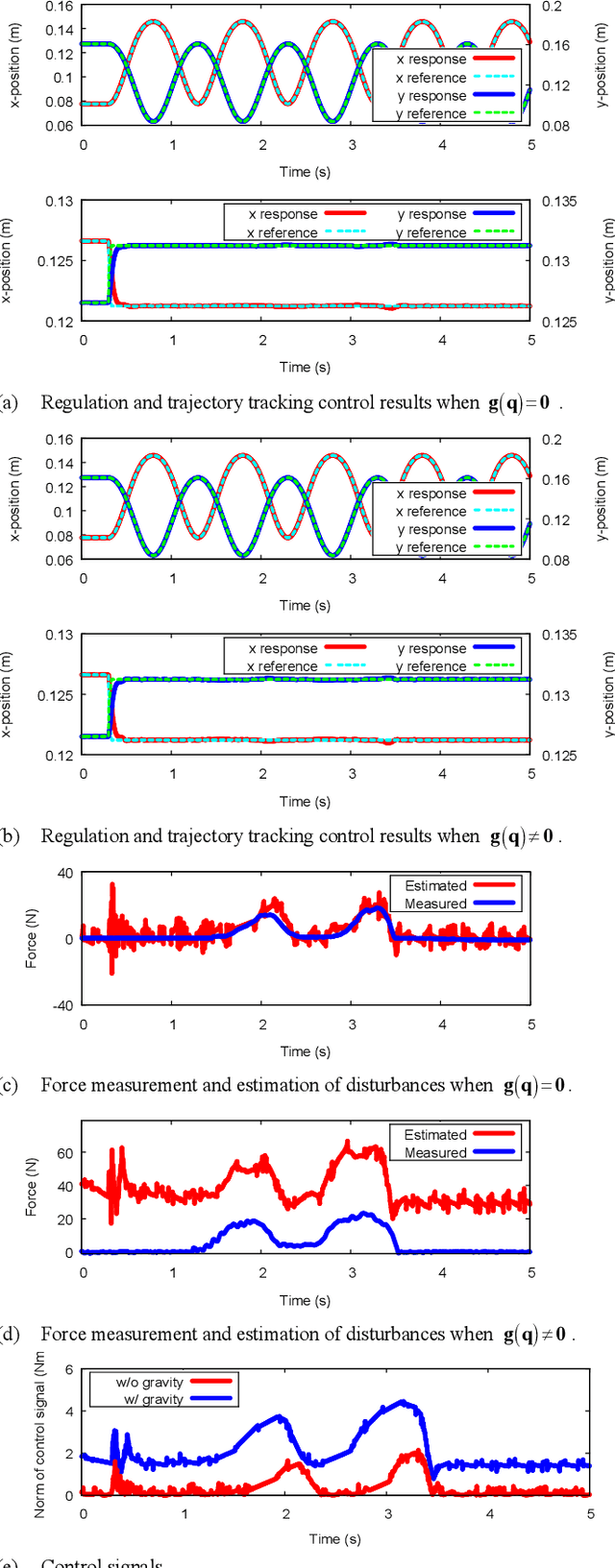
This paper proposes a new nonlinear stability analysis for the acceleration-based robust position control of robot manipulators by using Disturbance Observer (DOb). It is shown that if the nominal inertia matrix is properly tuned in the design of DOb, then the position error asymptotically goes to zero in regulation control and is uniformly ultimately bounded in trajectory tracking control. As the bandwidth of DOb and the nominal inertia matrix are increased, the bound of error shrinks, i.e., the robust stability and performance of the position control system are improved. However, neither the bandwidth of DOb nor the nominal inertia matrix can be freely increased due to practical design constraints, e.g., the robust position controller becomes more noise sensitive when they are increased. The proposed stability analysis provides insights regarding the dynamic behavior of DOb-based robust motion control systems. It is theoretically and experimentally proved that non-diagonal elements of the nominal inertia matrix are useful to improve the stability and adjust the trade-off between the robustness and noise sensitivity. The validity of the proposal is verified by simulation and experimental results.
* 9 pages, 9 figures, Journal