 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Robust Motion Controller Synthesis for Compliant Robots Driven by Series Elastic Actuators
Paper and Code
Feb 01, 2022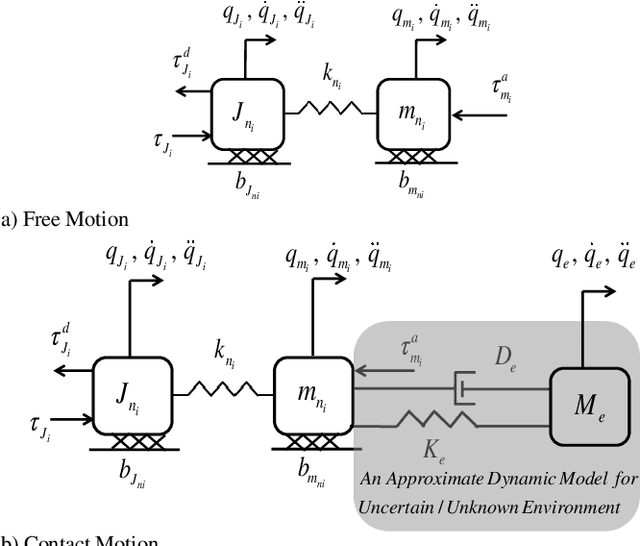

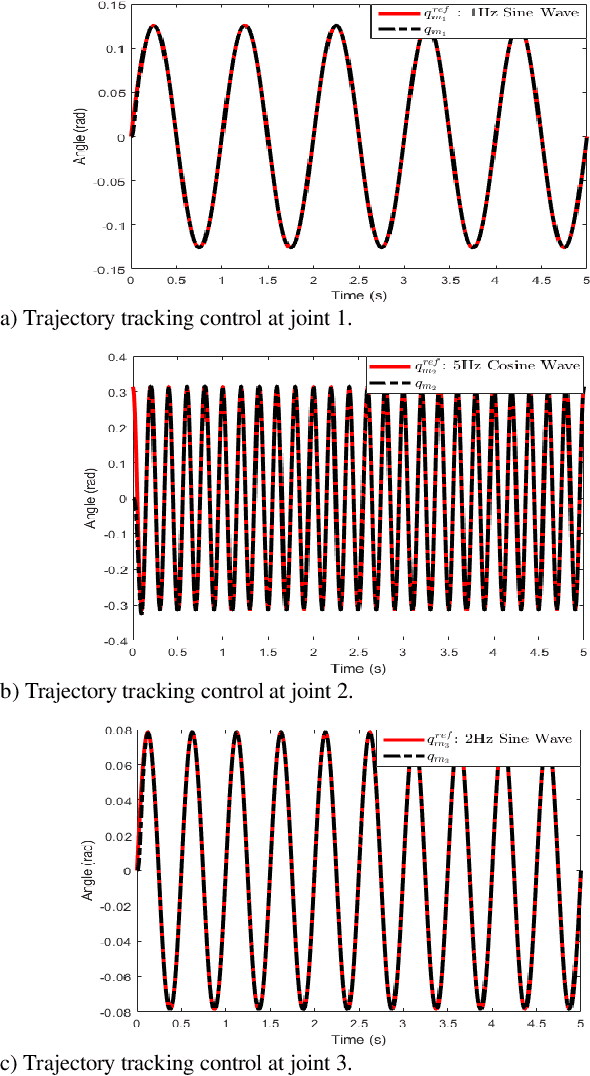
This paper proposes a unified robust motion controller for the position and force control problems of compliant robot manipulators driven by Series Elastic Actuators (SEAs). It is shown that the dynamic model of the compliant robot includes not only matched but also mismatched disturbances that act on the system through a different channel from the control input. To tackle this complex robust control problem, the unified robust motion controller is synthesised by employing a second-order Disturbance Observer (DOb), which allows us to estimate not only disturbances but also their first and second order derivatives, and a novel controller design approach in state space. By using the Brunovsky canonical form transformation and the estimations of disturbances and their first and second order derivatives, the dynamic model of the robot is reconstructed so that a new system model that includes only matched disturbances is obtained for compliant robots driven by SEAs. The robust position and force controllers are simply designed by eliminating the matched disturbances of the reconstructed system model via the conventional DOb-based robust control method. The stability and performance of the proposed robust motion controllers are verified by simulations.