 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecompGrind: A Decomposition Framework for Robotic Grinding via Cutting-Surface Planning and Contact-Force Adaptation
Mar 24, 2026Robotic grinding is widely used for shaping workpieces in manufacturing, but it remains difficult to automate this process efficiently. In particular, efficiently grinding workpieces of different shapes and material hardness is challenging because removal resistance varies with local contact conditions. Moreover, it is difficult to achieve accurate estimation of removal resistance and analytical modeling of shape transition, and learning-based approaches often require large amounts of training data to cover diverse processing conditions. To address these challenges, we decompose robotic grinding into two components: removal-shape planning and contact-force adaptation. Based on this formulation, we propose DecompGrind, a framework that combines Global Cutting-Surface Planning (GCSP) and Local Contact-Force Adaptation (LCFA). GCSP determines removal shapes through geometric analysis of the current and target shapes without learning, while LCFA learns a contact-force adaptation policy using bilateral control-based imitation learning during the grinding of each removal shape. This decomposition restricts learning to local contact-force adaptation, allowing the policy to be learned from a small number of demonstrations, while handling global shape transition geometrically. Experiments using a robotic grinding system and 3D-printed workpieces demonstrate efficient robotic grinding of workpieces having different shapes and material hardness while maintaining safe levels of contact force.
An Environment-Adaptive Position/Force Control Based on Physical Property Estimation
Dec 19, 2024



The technology for generating robot actions has significantly contributed to the automation and efficiency of tasks. However, the ability to adapt to objects of different shapes and hardness remains a challenge for general industrial robots. Motion reproduction systems (MRS) replicate previously acquired actions using position and force control, but generating actions for significantly different environments is difficult. Furthermore, methods based on machine learning require the acquisition of a large amount of motion data. This paper proposes a new method that matches the impedance of two pre-recorded action data with the current environmental impedance to generate highly adaptable actions. This method recalculates the command values for position and force based on the current impedance to improve reproducibility in different environments. Experiments conducted under conditions of extreme action impedance, such as position control and force control, confirmed the superiority of the proposed method over MRS. The advantages of this method include using only two sets of motion data, significantly reducing the burden of data acquisition compared to machine learning-based methods, and eliminating concerns about stability by using existing stable control systems. This study contributes to improving robots' environmental adaptability while simplifying the action generation method.
Stability and Robustness of the Disturbance Observer-based Motion Control Systems in Discrete-Time Domain
Oct 16, 2020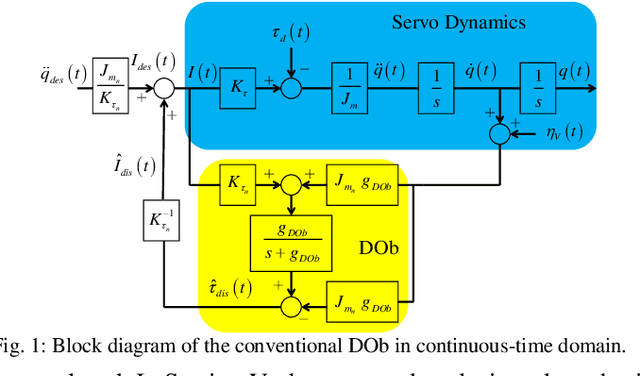
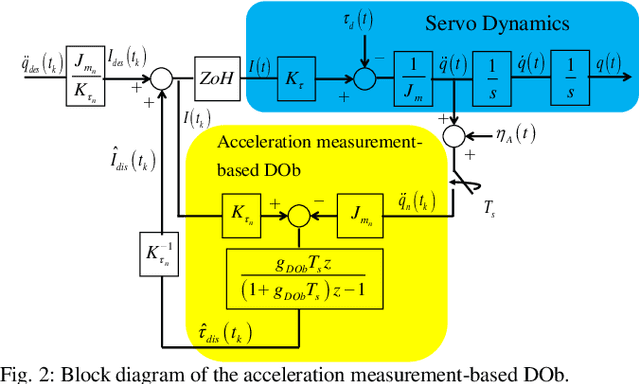
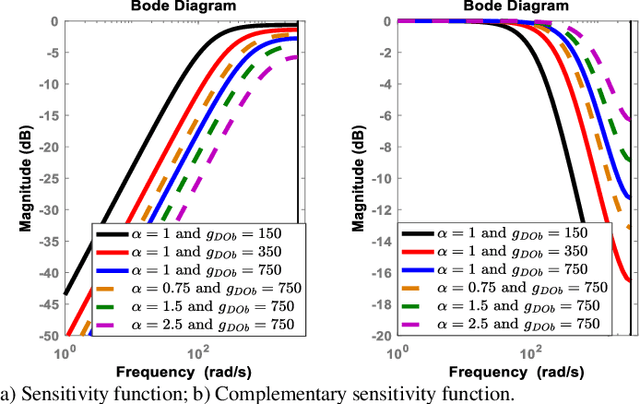
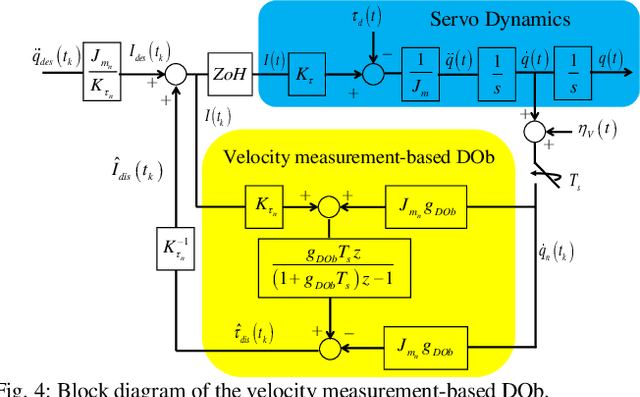
This paper analyses the robust stability and performance of the Disturbance Observer- (DOb-) based digital motion control systems in discrete-time domain. It is shown that the phase margin and the robustness of the digital motion controller can be directly adjusted by tuning the nominal plant model and the bandwidth of the observer. However, they have upper and lower bounds due to robust stability and performance constraints as well as noise-sensitivity. The constraints on the design parameters of the DOb change when the digital motion controller is synthesised by measuring different states of a servo system. For example, the bandwidth of the DOb is limited by noise-sensitivity and waterbed effect when velocity and position measurements are employed in the digital robust motion controller synthesis. The robustness constraint due to the waterbed effect is removed when the DOb is implemented by acceleration measurement. The design constraints on the nominal plant model and the bandwidth of the observer are analytically derived by employing the generalised Bode Integral Theorem in discrete-time. The proposed design constraints allow one to systematically synthesise a high-performance DOb-based digital robust motion controller. Experimental results are given to verify the proposed analysis and synthesis methods.
* 11 pages, 17 figures
A Stability Analysis for the Acceleration-based Robust Position Control of Robot Manipulators via Disturbance Observer
Feb 20, 2019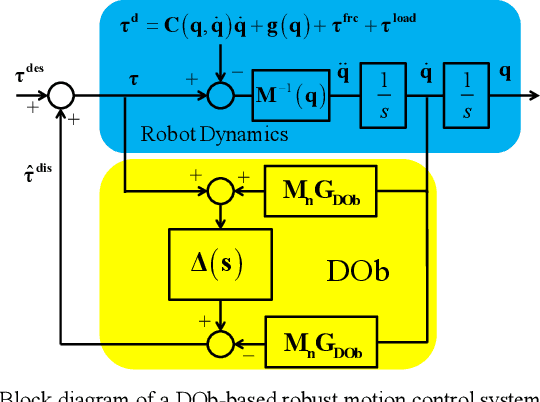
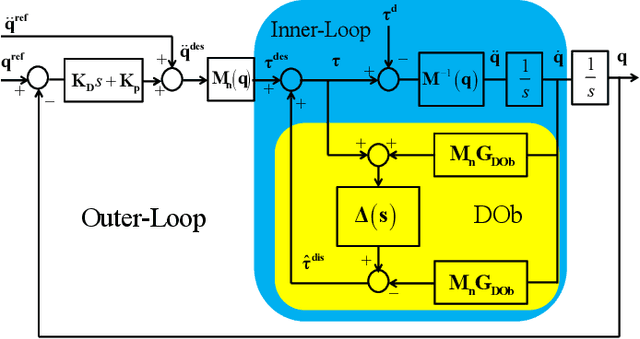
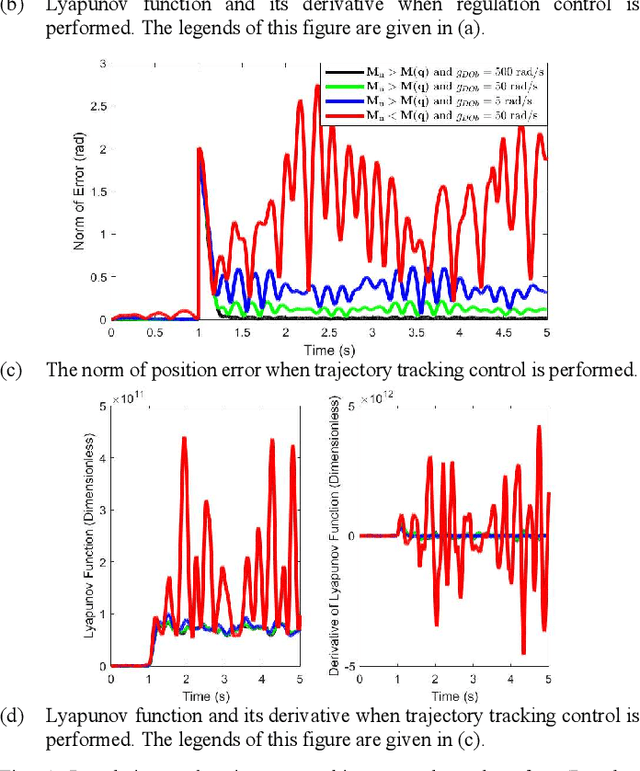
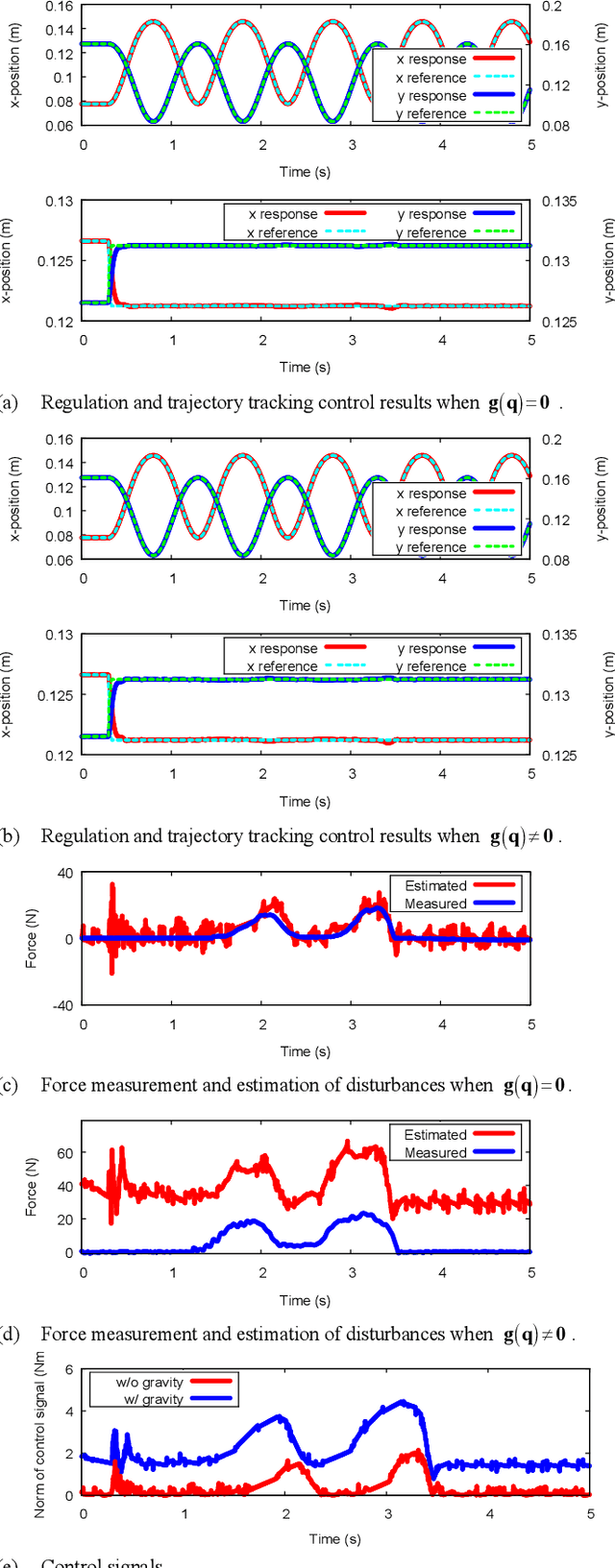
This paper proposes a new nonlinear stability analysis for the acceleration-based robust position control of robot manipulators by using Disturbance Observer (DOb). It is shown that if the nominal inertia matrix is properly tuned in the design of DOb, then the position error asymptotically goes to zero in regulation control and is uniformly ultimately bounded in trajectory tracking control. As the bandwidth of DOb and the nominal inertia matrix are increased, the bound of error shrinks, i.e., the robust stability and performance of the position control system are improved. However, neither the bandwidth of DOb nor the nominal inertia matrix can be freely increased due to practical design constraints, e.g., the robust position controller becomes more noise sensitive when they are increased. The proposed stability analysis provides insights regarding the dynamic behavior of DOb-based robust motion control systems. It is theoretically and experimentally proved that non-diagonal elements of the nominal inertia matrix are useful to improve the stability and adjust the trade-off between the robustness and noise sensitivity. The validity of the proposal is verified by simulation and experimental results.
* 9 pages, 9 figures, Journal