 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Sampling-Based Safe Motion Planning for Robotic Manipulators in Dynamic Environments
Dec 31, 2024In this paper, we present the main features of Dynamic Rapidly-exploring Generalized Bur Tree (DRGBT) algorithm, a sampling-based planner for dynamic environments. We provide a detailed time analysis and appropriate scheduling to facilitate a real-time operation. To this end, an extensive analysis is conducted to identify the time-critical routines and their dependence on the number of obstacles. Furthermore, information about the distance to obstacles is used to compute a structure called dynamic expanded bubble of free configuration space, which is then utilized to establish sufficient conditions for a guaranteed safe motion of the robot while satisfying all kinematic constraints. An extensive randomized simulation trial is conducted to compare the proposed algorithm to a competing state-of-the-art method. Finally, an experimental study on a real robot is carried out covering a variety of scenarios including those with human presence. The results show the effectiveness and feasibility of real-time execution of the proposed motion planning algorithm within a typical sensor-based arrangement, using cheap hardware and sequential architecture, without the necessity for GPUs or heavy parallelization.
Stability and Robustness of the Disturbance Observer-based Motion Control Systems in Discrete-Time Domain
Oct 16, 2020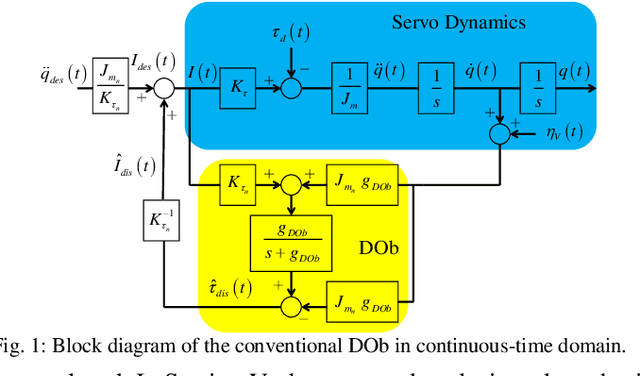
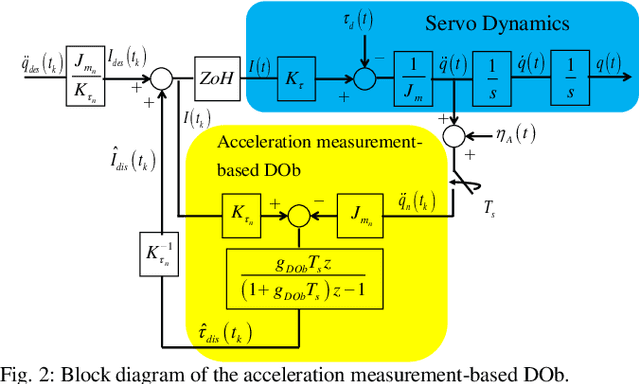
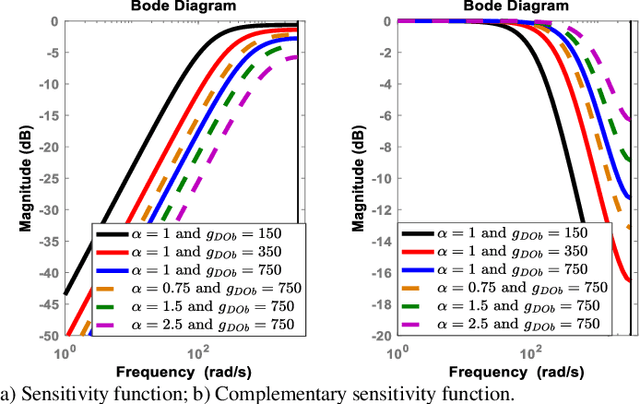
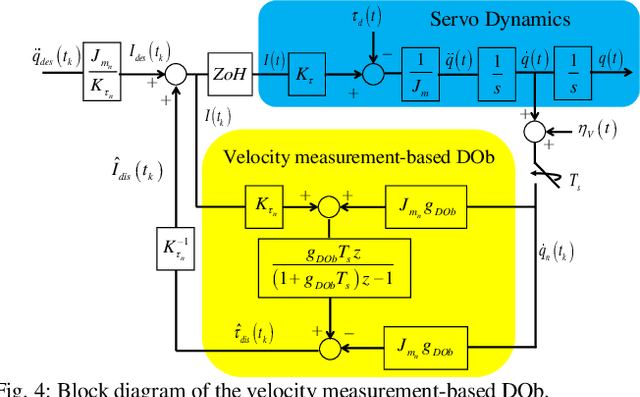
This paper analyses the robust stability and performance of the Disturbance Observer- (DOb-) based digital motion control systems in discrete-time domain. It is shown that the phase margin and the robustness of the digital motion controller can be directly adjusted by tuning the nominal plant model and the bandwidth of the observer. However, they have upper and lower bounds due to robust stability and performance constraints as well as noise-sensitivity. The constraints on the design parameters of the DOb change when the digital motion controller is synthesised by measuring different states of a servo system. For example, the bandwidth of the DOb is limited by noise-sensitivity and waterbed effect when velocity and position measurements are employed in the digital robust motion controller synthesis. The robustness constraint due to the waterbed effect is removed when the DOb is implemented by acceleration measurement. The design constraints on the nominal plant model and the bandwidth of the observer are analytically derived by employing the generalised Bode Integral Theorem in discrete-time. The proposed design constraints allow one to systematically synthesise a high-performance DOb-based digital robust motion controller. Experimental results are given to verify the proposed analysis and synthesis methods.
* 11 pages, 17 figures