 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariable Stiffness Improves Safety and Performance in Soft Robotics
Feb 06, 2023This paper proposes a new variable stiffness soft gripper that enables high-performance grasping tasks in industrial applications. The design of the proposed monolithic soft gripper includes a middle bellow and two side bellows (i.e., fingers). The positions of the fingers are regulated by adjusting the negative pressure in the middle bellow actuator via an on-off controller. The stiffness of the soft gripper is modulated by controlling the positive pressure in the fingers through the use of a proportional air-pressure regulator. It is experimentally shown that the proposed soft gripper can modulate its stiffness by 125% within 250ms. It is also shown that the variable stiffness soft gripper can help improve the safety and performance of grasping tasks in industrial applications.
Design and Control of a Novel Variable Stiffness Series Elastic Actuator
Jan 03, 2023



This paper expounds the design and control of a new Variable Stiffness Series Elastic Actuator (VSSEA). It is established by employing a modular mechanical design approach that allows us to effectively optimise the stiffness modulation characteristics and power density of the actuator. The proposed VSSEA possesses the following features: i) no limitation in the work-range of output link, ii) a wide range of stiffness modulation (~20Nm/rad to ~1KNm/rad), iii) low-energy-cost stiffness modulation at equilibrium and non-equilibrium positions, iv) compact design and high torque density (~36Nm/kg), and v) high-speed stiffness modulation (~3000Nm/rad/s). Such features can help boost the safety and performance of many advanced robotic systems, e.g., a cobot that physically interacts with unstructured environments and an exoskeleton that provides physical assistance to human users. These features can also enable us to utilise variable stiffness property to attain various regulation and trajectory tracking control tasks only by employing conventional controllers, eliminating the need for synthesising complex motion control systems in compliant actuation. To this end, it is experimentally demonstrated that the proposed VSSEA is capable of precisely tracking desired position and force control references through the use of conventional Proportional-Integral-Derivative (PID) controllers.
* IEEE/ASME TRANSACTIONS ON MECHATRONICS
A Sliding Mode Force and Position Controller Synthesis for Series Elastic Actuators
Mar 13, 2019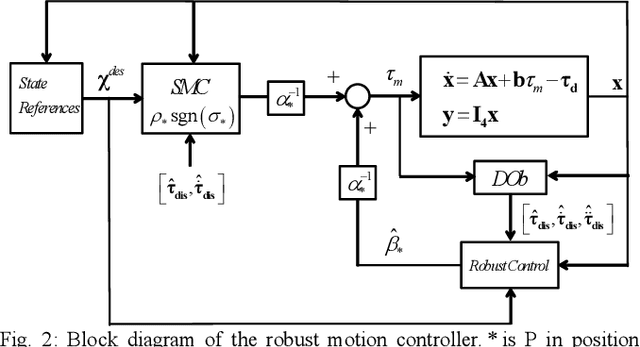
This paper deals with the robust force and position control problems of Series Elastic Actuators. It is shown that a Series Elastic Actuator's force control problem can be described by a second-order dynamic model which suffers from only matched disturbances. However, the position control dynamics of a Series Elastic Actuator is of fourth-order and includes matched and mismatched disturbances. In other words, a Series Elastic Actuator's position control is more complicated than its force control, particularly when disturbances are considered. A novel robust motion controller is proposed for Series Elastic Actuators by using Disturbance Observer and Sliding Mode Control. When the proposed robust motion controller is implemented, a Series Elastic Actuator can precisely track desired trajectories and safely contact with an unknown and dynamic environment. The proposed motion controller does not require precise dynamic models of the actuator and environment. Therefore, it can be applied to many different advanced robotic systems such as compliant humanoids and exoskeletons. The validity of the motion controller is experimentally verified.