 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuMa++: Efficient LiDAR-based Semantic SLAM
May 24, 2021
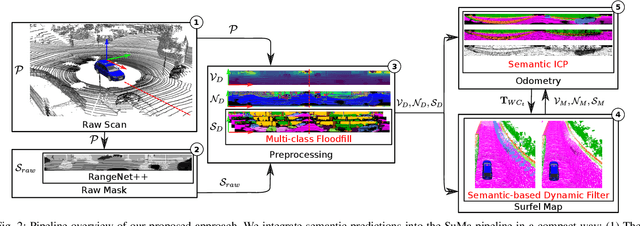


Reliable and accurate localization and mapping are key components of most autonomous systems. Besides geometric information about the mapped environment, the semantics plays an important role to enable intelligent navigation behaviors. In most realistic environments, this task is particularly complicated due to dynamics caused by moving objects, which can corrupt the mapping step or derail localization. In this paper, we propose an extension of a recently published surfel-based mapping approach exploiting three-dimensional laser range scans by integrating semantic information to facilitate the mapping process. The semantic information is efficiently extracted by a fully convolutional neural network and rendered on a spherical projection of the laser range data. This computed semantic segmentation results in point-wise labels for the whole scan, allowing us to build a semantically-enriched map with labeled surfels. This semantic map enables us to reliably filter moving objects, but also improve the projective scan matching via semantic constraints. Our experimental evaluation on challenging highways sequences from KITTI dataset with very few static structures and a large amount of moving cars shows the advantage of our semantic SLAM approach in comparison to a purely geometric, state-of-the-art approach.
ReFusion: 3D Reconstruction in Dynamic Environments for RGB-D Cameras Exploiting Residuals
May 20, 2019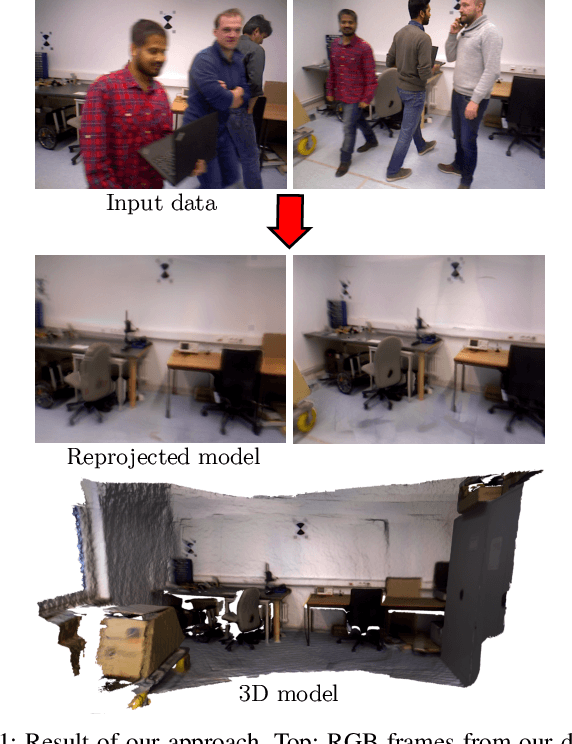
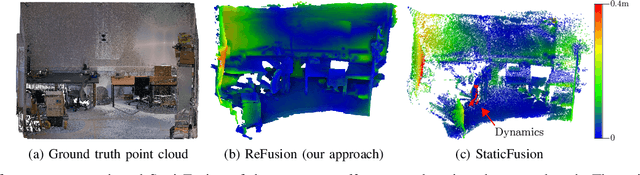
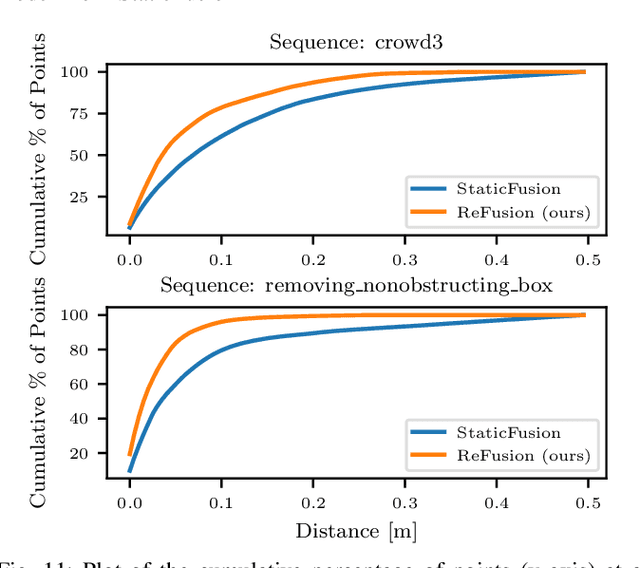
Mapping and localization are essential capabilities of robotic systems. Although the majority of mapping systems focus on static environments, the deployment in real-world situations requires them to handle dynamic objects. In this paper, we propose an approach for an RGB-D sensor that is able to consistently map scenes containing multiple dynamic elements. For localization and mapping, we employ an efficient direct tracking on the truncated signed distance function (TSDF) and leverage color information encoded in the TSDF to estimate the pose of the sensor. The TSDF is efficiently represented using voxel hashing, with most computations parallelized on a GPU. For detecting dynamics, we exploit the residuals obtained after an initial registration, together with the explicit modeling of free space in the model. We evaluate our approach on existing datasets, and provide a new dataset showing highly dynamic scenes. These experiments show that our approach often surpass other state-of-the-art dense SLAM methods. We make available our dataset with the ground truth for both the trajectory of the RGB-D sensor obtained by a motion capture system and the model of the static environment using a high-precision terrestrial laser scanner. Finally, we release our approach as open source code.