 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing Complexity-aware Plans Using Kolmogorov Complexity
Sep 22, 2021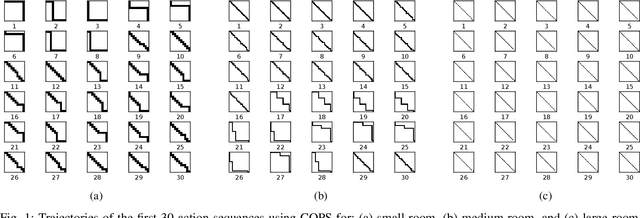
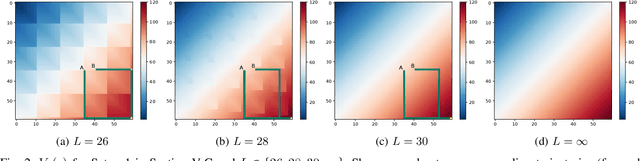
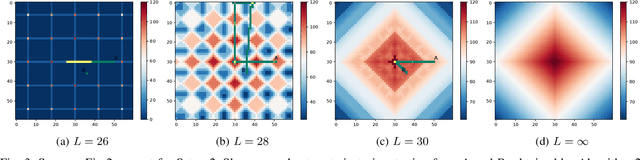

In this paper, we introduce complexity-aware planning for finite-horizon deterministic finite automata with rewards as outputs, based on Kolmogorov complexity. Kolmogorov complexity is considered since it can detect computational regularities of deterministic optimal policies. We present a planning objective yielding an explicit trade-off between a policy's performance and complexity. It is proven that maximising this objective is non-trivial in the sense that dynamic programming is infeasible. We present two algorithms obtaining low-complexity policies, where the first algorithm obtains a low-complexity optimal policy, and the second algorithm finds a policy maximising performance while maintaining local (stage-wise) complexity constraints. We evaluate the algorithms on a simple navigation task for a mobile robot, where our algorithms yield low-complexity policies that concur with intuition.
Hierarchical Game-Theoretic Planning for Autonomous Vehicles
Oct 13, 2018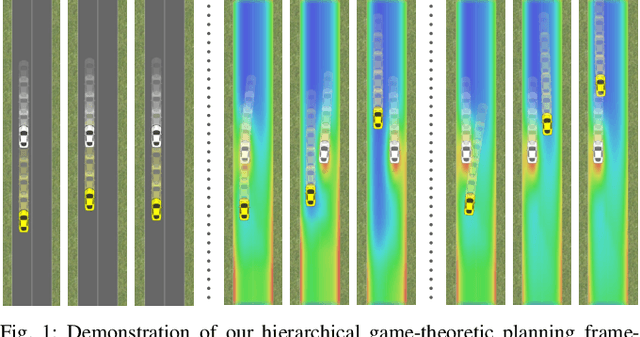
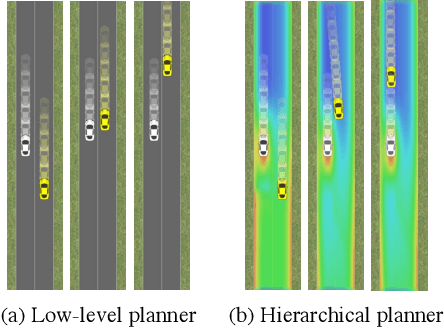
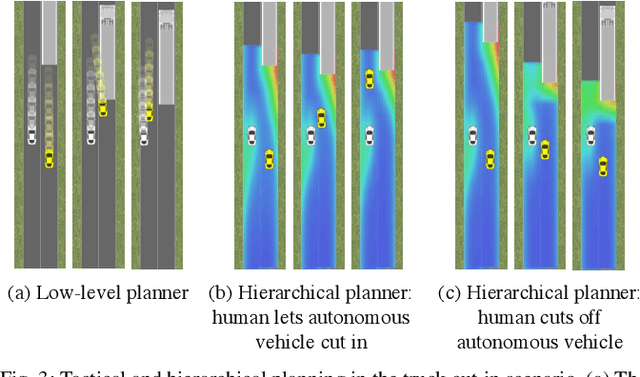
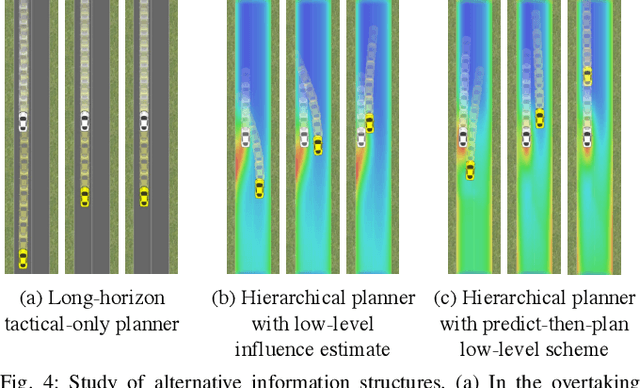
The actions of an autonomous vehicle on the road affect and are affected by those of other drivers, whether overtaking, negotiating a merge, or avoiding an accident. This mutual dependence, best captured by dynamic game theory, creates a strong coupling between the vehicle's planning and its predictions of other drivers' behavior, and constitutes an open problem with direct implications on the safety and viability of autonomous driving technology. Unfortunately, dynamic games are too computationally demanding to meet the real-time constraints of autonomous driving in its continuous state and action space. In this paper, we introduce a novel game-theoretic trajectory planning algorithm for autonomous driving, that enables real-time performance by hierarchically decomposing the underlying dynamic game into a long-horizon "strategic" game with simplified dynamics and full information structure, and a short-horizon "tactical" game with full dynamics and a simplified information structure. The value of the strategic game is used to guide the tactical planning, implicitly extending the planning horizon, pushing the local trajectory optimization closer to global solutions, and, most importantly, quantitatively accounting for the autonomous vehicle and the human driver's ability and incentives to influence each other. In addition, our approach admits non-deterministic models of human decision-making, rather than relying on perfectly rational predictions. Our results showcase richer, safer, and more effective autonomous behavior in comparison to existing techniques.