 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Adversarial Implications of Variable-Time Inference
Sep 05, 2023

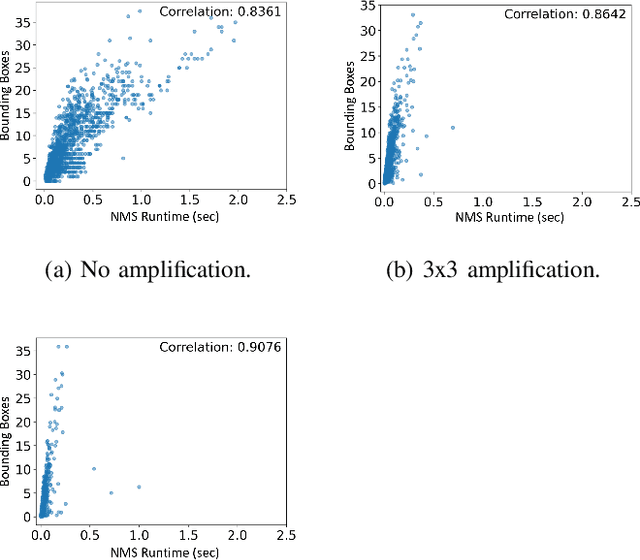

Machine learning (ML) models are known to be vulnerable to a number of attacks that target the integrity of their predictions or the privacy of their training data. To carry out these attacks, a black-box adversary must typically possess the ability to query the model and observe its outputs (e.g., labels). In this work, we demonstrate, for the first time, the ability to enhance such decision-based attacks. To accomplish this, we present an approach that exploits a novel side channel in which the adversary simply measures the execution time of the algorithm used to post-process the predictions of the ML model under attack. The leakage of inference-state elements into algorithmic timing side channels has never been studied before, and we have found that it can contain rich information that facilitates superior timing attacks that significantly outperform attacks based solely on label outputs. In a case study, we investigate leakage from the non-maximum suppression (NMS) algorithm, which plays a crucial role in the operation of object detectors. In our examination of the timing side-channel vulnerabilities associated with this algorithm, we identified the potential to enhance decision-based attacks. We demonstrate attacks against the YOLOv3 detector, leveraging the timing leakage to successfully evade object detection using adversarial examples, and perform dataset inference. Our experiments show that our adversarial examples exhibit superior perturbation quality compared to a decision-based attack. In addition, we present a new threat model in which dataset inference based solely on timing leakage is performed. To address the timing leakage vulnerability inherent in the NMS algorithm, we explore the potential and limitations of implementing constant-time inference passes as a mitigation strategy.
EyeDAS: Securing Perception of Autonomous Cars Against the Stereoblindness Syndrome
May 13, 2022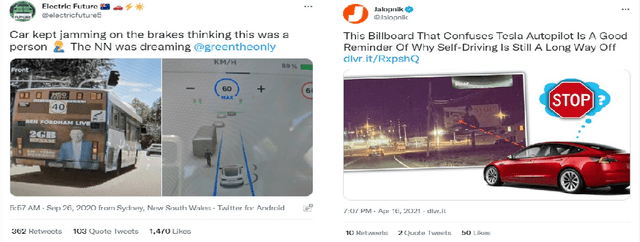
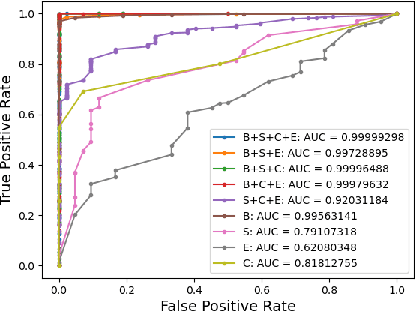
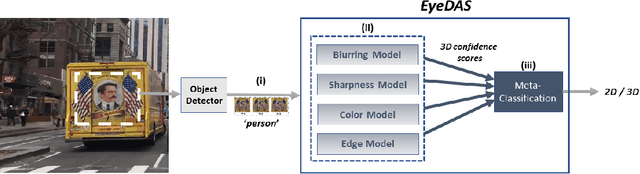

The ability to detect whether an object is a 2D or 3D object is extremely important in autonomous driving, since a detection error can have life-threatening consequences, endangering the safety of the driver, passengers, pedestrians, and others on the road. Methods proposed to distinguish between 2 and 3D objects (e.g., liveness detection methods) are not suitable for autonomous driving, because they are object dependent or do not consider the constraints associated with autonomous driving (e.g., the need for real-time decision-making while the vehicle is moving). In this paper, we present EyeDAS, a novel few-shot learning-based method aimed at securing an object detector (OD) against the threat posed by the stereoblindness syndrome (i.e., the inability to distinguish between 2D and 3D objects). We evaluate EyeDAS's real-time performance using 2,000 objects extracted from seven YouTube video recordings of street views taken by a dash cam from the driver's seat perspective. When applying EyeDAS to seven state-of-the-art ODs as a countermeasure, EyeDAS was able to reduce the 2D misclassification rate from 71.42-100% to 2.4% with a 3D misclassification rate of 0% (TPR of 1.0). We also show that EyeDAS outperforms the baseline method and achieves an AUC of over 0.999 and a TPR of 1.0 with an FPR of 0.024.
CAN-LOC: Spoofing Detection and Physical Intrusion Localization on an In-Vehicle CAN Bus Based on Deep Features of Voltage Signals
Jun 15, 2021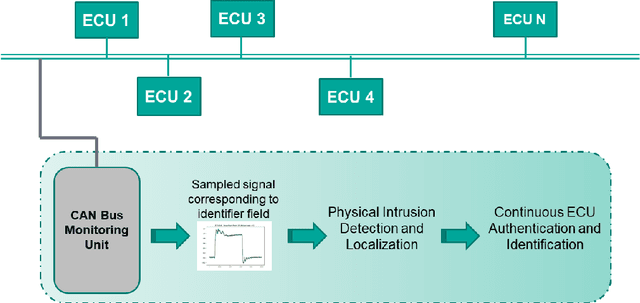
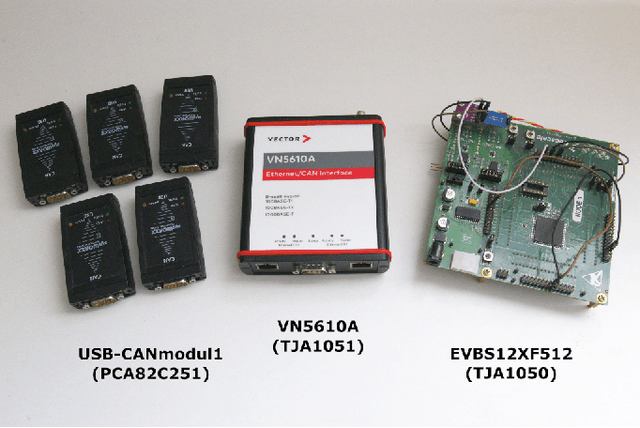
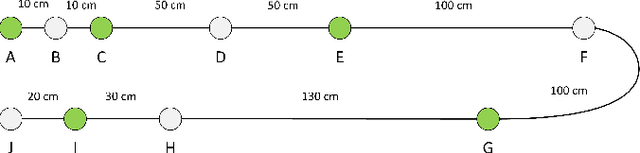
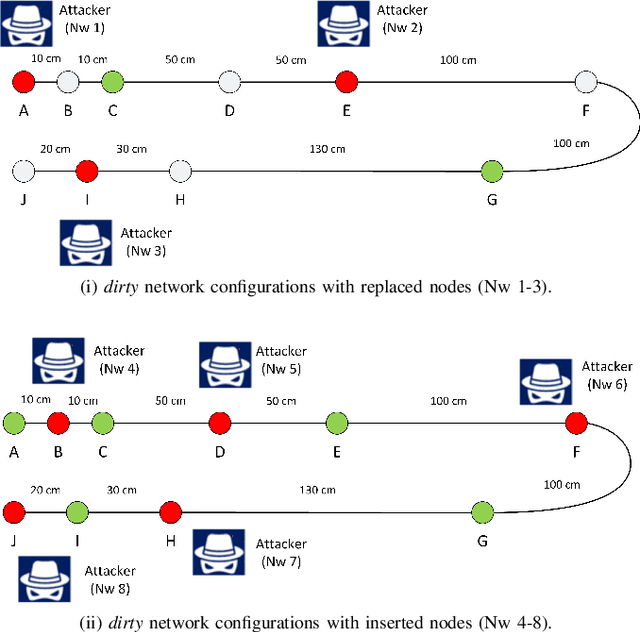
The Controller Area Network (CAN) is used for communication between in-vehicle devices. The CAN bus has been shown to be vulnerable to remote attacks. To harden vehicles against such attacks, vehicle manufacturers have divided in-vehicle networks into sub-networks, logically isolating critical devices. However, attackers may still have physical access to various sub-networks where they can connect a malicious device. This threat has not been adequately addressed, as methods proposed to determine physical intrusion points have shown weak results, emphasizing the need to develop more advanced techniques. To address this type of threat, we propose a security hardening system for in-vehicle networks. The proposed system includes two mechanisms that process deep features extracted from voltage signals measured on the CAN bus. The first mechanism uses data augmentation and deep learning to detect and locate physical intrusions when the vehicle starts; this mechanism can detect and locate intrusions, even when the connected malicious devices are silent. This mechanism's effectiveness (100% accuracy) is demonstrated in a wide variety of insertion scenarios on a CAN bus prototype. The second mechanism is a continuous device authentication mechanism, which is also based on deep learning; this mechanism's robustness (99.8% accuracy) is demonstrated on a real moving vehicle.
RadArnomaly: Protecting Radar Systems from Data Manipulation Attacks
Jun 13, 2021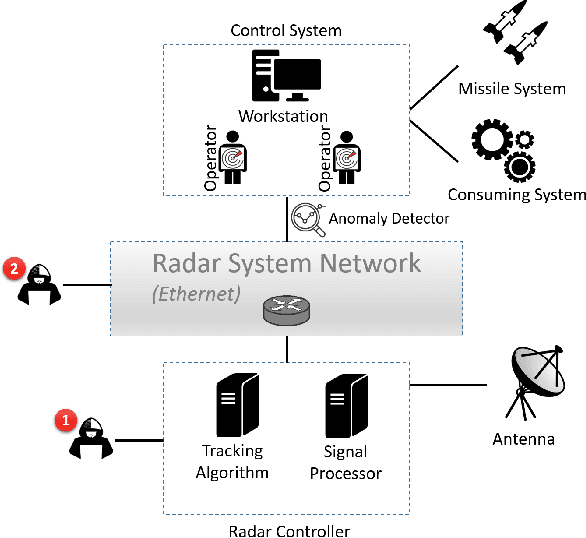
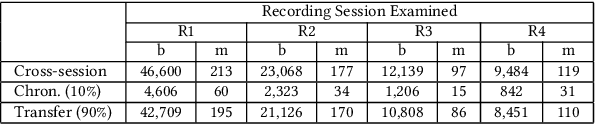
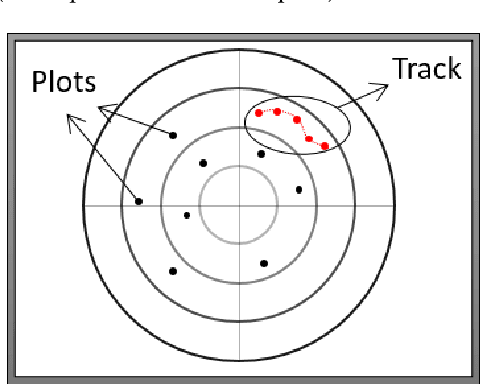
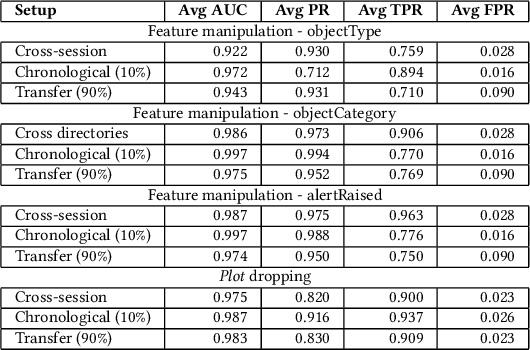
Radar systems are mainly used for tracking aircraft, missiles, satellites, and watercraft. In many cases, information regarding the objects detected by the radar system is sent to, and used by, a peripheral consuming system, such as a missile system or a graphical user interface used by an operator. Those systems process the data stream and make real-time, operational decisions based on the data received. Given this, the reliability and availability of information provided by radar systems has grown in importance. Although the field of cyber security has been continuously evolving, no prior research has focused on anomaly detection in radar systems. In this paper, we present a deep learning-based method for detecting anomalies in radar system data streams. We propose a novel technique which learns the correlation between numerical features and an embedding representation of categorical features in an unsupervised manner. The proposed technique, which allows the detection of malicious manipulation of critical fields in the data stream, is complemented by a timing-interval anomaly detection mechanism proposed for the detection of message dropping attempts. Real radar system data is used to evaluate the proposed method. Our experiments demonstrate the method's high detection accuracy on a variety of data stream manipulation attacks (average detection rate of 88% with 1.59% false alarms) and message dropping attacks (average detection rate of 92% with 2.2% false alarms).