 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManipulationNet: An Infrastructure for Benchmarking Real-World Robot Manipulation with Physical Skill Challenges and Embodied Multimodal Reasoning
Mar 04, 2026Dexterous manipulation enables robots to purposefully alter the physical world, transforming them from passive observers into active agents in unstructured environments. This capability is the cornerstone of physical artificial intelligence. Despite decades of advances in hardware, perception, control, and learning, progress toward general manipulation systems remains fragmented due to the absence of widely adopted standard benchmarks. The central challenge lies in reconciling the variability of the real world with the reproducibility and authenticity required for rigorous scientific evaluation. To address this, we introduce ManipulationNet, a global infrastructure that hosts real-world benchmark tasks for robotic manipulation. ManipulationNet delivers reproducible task setups through standardized hardware kits, and enables distributed performance evaluation via a unified software client that delivers real-time task instructions and collects benchmarking results. As a persistent and scalable infrastructure, ManipulationNet organizes benchmark tasks into two complementary tracks: 1) the Physical Skills Track, which evaluates low-level physical interaction skills, and 2) the Embodied Reasoning Track, which tests high-level reasoning and multimodal grounding abilities. This design fosters the systematic growth of an interconnected network of real-world abilities and skills, paving the path toward general robotic manipulation. By enabling comparable manipulation research in the real world at scale, this infrastructure establishes a sustainable foundation for measuring long-term scientific progress and identifying capabilities ready for real-world deployment.
Sashimi-Bot: Autonomous Tri-manual Advanced Manipulation and Cutting of Deformable Objects
Nov 14, 2025Advanced robotic manipulation of deformable, volumetric objects remains one of the greatest challenges due to their pliancy, frailness, variability, and uncertainties during interaction. Motivated by these challenges, this article introduces Sashimi-Bot, an autonomous multi-robotic system for advanced manipulation and cutting, specifically the preparation of sashimi. The objects that we manipulate, salmon loins, are natural in origin and vary in size and shape, they are limp and deformable with poorly characterized elastoplastic parameters, while also being slippery and hard to hold. The three robots straighten the loin; grasp and hold the knife; cut with the knife in a slicing motion while cooperatively stabilizing the loin during cutting; and pick up the thin slices from the cutting board or knife blade. Our system combines deep reinforcement learning with in-hand tool shape manipulation, in-hand tool cutting, and feedback of visual and tactile information to achieve robustness to the variabilities inherent in this task. This work represents a milestone in robotic manipulation of deformable, volumetric objects that may inspire and enable a wide range of other real-world applications.
Object Recognition and Force Estimation with the GelSight Baby Fin Ray
Sep 18, 2025Recent advances in soft robotic hands and tactile sensing have enabled both to perform an increasing number of complex tasks with the aid of machine learning. In particular, we presented the GelSight Baby Fin Ray in our previous work, which integrates a camera with a soft, compliant Fin Ray structure. Camera-based tactile sensing gives the GelSight Baby Fin Ray the ability to capture rich contact information like forces, object geometries, and textures. Moreover, our previous work showed that the GelSight Baby Fin Ray can dig through clutter, and classify in-shell nuts. To further examine the potential of the GelSight Baby Fin Ray, we leverage learning to distinguish nut-in-shell textures and to perform force and position estimation. We implement ablation studies with popular neural network structures, including ResNet50, GoogLeNet, and 3- and 5-layer convolutional neural network (CNN) structures. We conclude that machine learning is a promising technique to extract useful information from high-resolution tactile images and empower soft robotics to better understand and interact with the environments.
Grasp EveryThing (GET): 1-DoF, 3-Fingered Gripper with Tactile Sensing for Robust Grasping
May 14, 2025



We introduce the Grasp EveryThing (GET) gripper, a novel 1-DoF, 3-finger design for securely grasping objects of many shapes and sizes. Mounted on a standard parallel jaw actuator, the design features three narrow, tapered fingers arranged in a two-against-one configuration, where the two fingers converge into a V-shape. The GET gripper is more capable of conforming to object geometries and forming secure grasps than traditional designs with two flat fingers. Inspired by the principle of self-similarity, these V-shaped fingers enable secure grasping across a wide range of object sizes. Further to this end, fingers are parametrically designed for convenient resizing and interchangeability across robotic embodiments with a parallel jaw gripper. Additionally, we incorporate a rigid fingernail to enhance small object manipulation. Tactile sensing can be integrated into the standalone finger via an externally-mounted camera. A neural network was trained to estimate normal force from tactile images with an average validation error of 1.3~N across a diverse set of geometries. In grasping 15 objects and performing 3 tasks via teleoperation, the GET fingers consistently outperformed standard flat fingers. Finger designs for use with multiple robotic embodiments are available on GitHub.
Transferable Tactile Transformers for Representation Learning Across Diverse Sensors and Tasks
Jun 19, 2024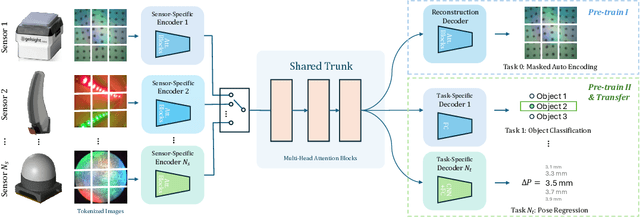
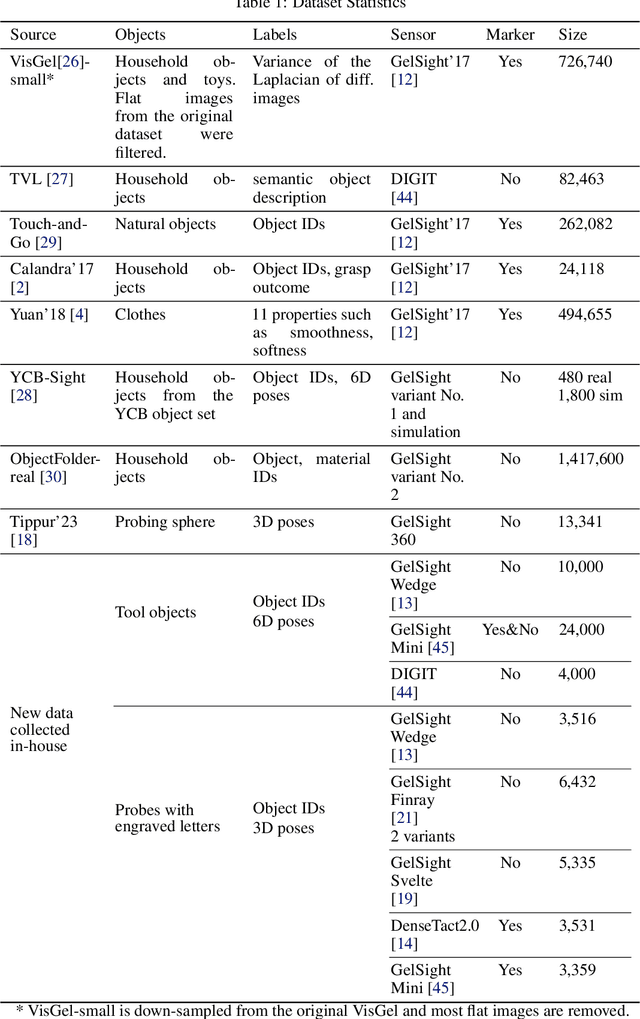
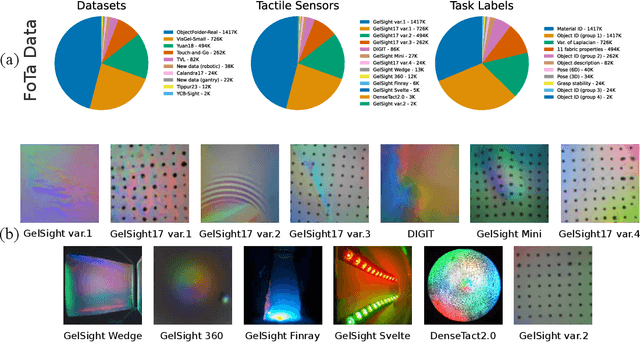
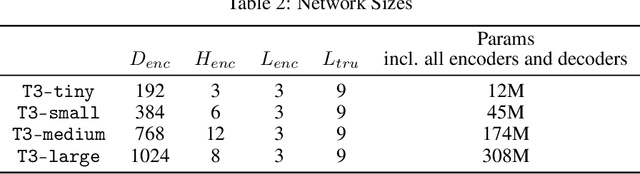
This paper presents T3: Transferable Tactile Transformers, a framework for tactile representation learning that scales across multi-sensors and multi-tasks. T3 is designed to overcome the contemporary issue that camera-based tactile sensing is extremely heterogeneous, i.e. sensors are built into different form factors, and existing datasets were collected for disparate tasks. T3 captures the shared latent information across different sensor-task pairings by constructing a shared trunk transformer with sensor-specific encoders and task-specific decoders. The pre-training of T3 utilizes a novel Foundation Tactile (FoTa) dataset, which is aggregated from several open-sourced datasets and it contains over 3 million data points gathered from 13 sensors and 11 tasks. FoTa is the largest and most diverse dataset in tactile sensing to date and it is made publicly available in a unified format. Across various sensors and tasks, experiments show that T3 pre-trained with FoTa achieved zero-shot transferability in certain sensor-task pairings, can be further fine-tuned with small amounts of domain-specific data, and its performance scales with bigger network sizes. T3 is also effective as a tactile encoder for long horizon contact-rich manipulation. Results from sub-millimeter multi-pin electronics insertion tasks show that T3 achieved a task success rate 25% higher than that of policies trained with tactile encoders trained from scratch, or 53% higher than without tactile sensing. Data, code, and model checkpoints are open-sourced at https://t3.alanz.info.
A Passively Bendable, Compliant Tactile Palm with RObotic Modular Endoskeleton Optical (ROMEO) Fingers
Apr 12, 2024



Many robotic hands currently rely on extremely dexterous robotic fingers and a thumb joint to envelop themselves around an object. Few hands focus on the palm even though human hands greatly benefit from their central fold and soft surface. As such, we develop a novel structurally compliant soft palm, which enables more surface area contact for the objects that are pressed into it. Moreover, this design, along with the development of a new low-cost, flexible illumination system, is able to incorporate a high-resolution tactile sensing system inspired by the GelSight sensors. Concurrently, we design RObotic Modular Endoskeleton Optical (ROMEO) fingers, which are underactuated two-segment soft fingers that are able to house the new illumination system, and we integrate them into these various palm configurations. The resulting robotic hand is slightly bigger than a baseball and represents one of the first soft robotic hands with actuated fingers and a passively compliant palm, all of which have high-resolution tactile sensing. This design also potentially helps researchers discover and explore more soft-rigid tactile robotic hand designs with greater capabilities in the future. The supplementary video can be found here: https://youtu.be/RKfIFiewqsg
Scalable, Simulation-Guided Compliant Tactile Finger Design
Mar 07, 2024
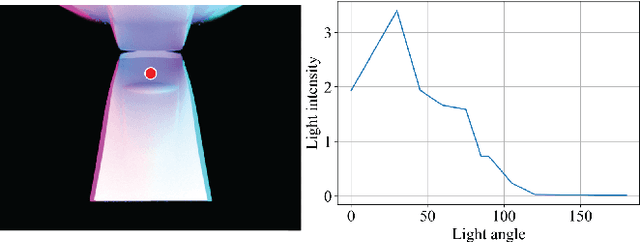

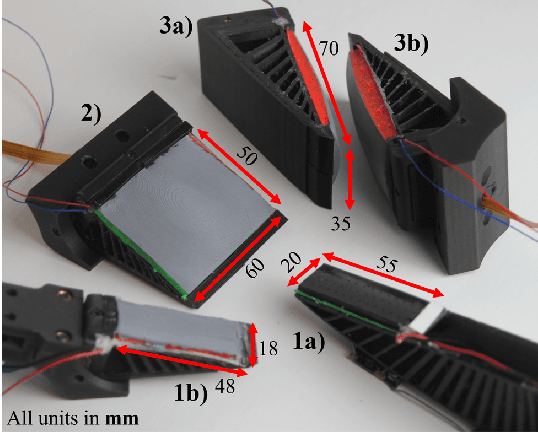
Compliant grippers enable robots to work with humans in unstructured environments. In general, these grippers can improve with tactile sensing to estimate the state of objects around them to precisely manipulate objects. However, co-designing compliant structures with high-resolution tactile sensing is a challenging task. We propose a simulation framework for the end-to-end forward design of GelSight Fin Ray sensors. Our simulation framework consists of mechanical simulation using the finite element method (FEM) and optical simulation including physically based rendering (PBR). To simulate the fluorescent paint used in these GelSight Fin Rays, we propose an efficient method that can be directly integrated in PBR. Using the simulation framework, we investigate design choices available in the compliant grippers, namely gel pad shapes, illumination conditions, Fin Ray gripper sizes, and Fin Ray stiffness. This infrastructure enables faster design and prototype time frames of new Fin Ray sensors that have various sensing areas, ranging from 48 mm $\times$ \18 mm to 70 mm $\times$ 35 mm. Given the parameters we choose, we can thus optimize different Fin Ray designs and show their utility in grasping day-to-day objects.
PoCo: Policy Composition from and for Heterogeneous Robot Learning
Feb 04, 2024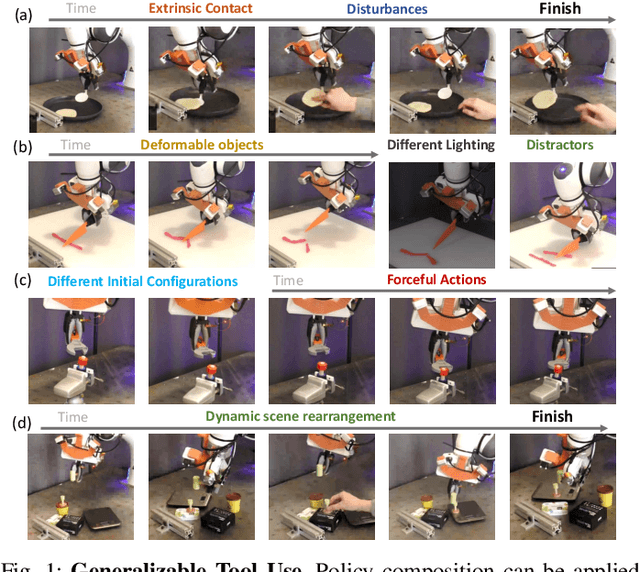
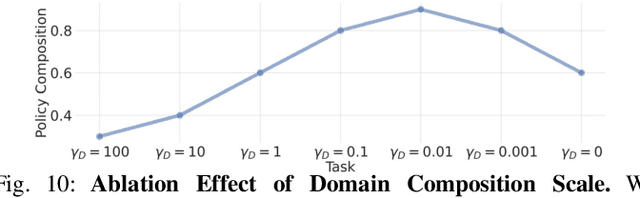
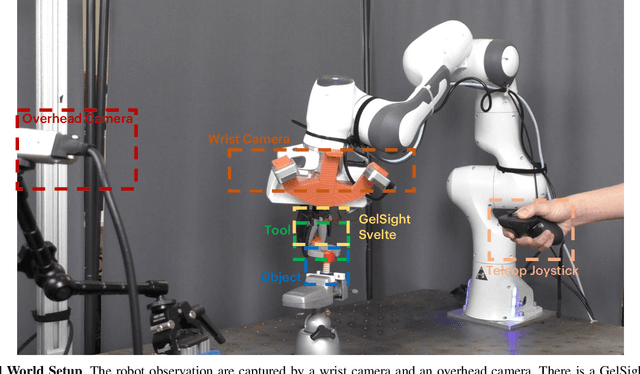
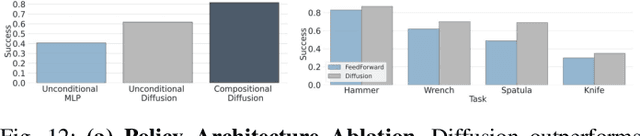
Training general robotic policies from heterogeneous data for different tasks is a significant challenge. Existing robotic datasets vary in different modalities such as color, depth, tactile, and proprioceptive information, and collected in different domains such as simulation, real robots, and human videos. Current methods usually collect and pool all data from one domain to train a single policy to handle such heterogeneity in tasks and domains, which is prohibitively expensive and difficult. In this work, we present a flexible approach, dubbed Policy Composition, to combine information across such diverse modalities and domains for learning scene-level and task-level generalized manipulation skills, by composing different data distributions represented with diffusion models. Our method can use task-level composition for multi-task manipulation and be composed with analytic cost functions to adapt policy behaviors at inference time. We train our method on simulation, human, and real robot data and evaluate in tool-use tasks. The composed policy achieves robust and dexterous performance under varying scenes and tasks and outperforms baselines from a single data source in both simulation and real-world experiments. See https://liruiw.github.io/policycomp for more details .
GelSight Svelte Hand: A Three-finger, Two-DoF, Tactile-rich, Low-cost Robot Hand for Dexterous Manipulation
Sep 19, 2023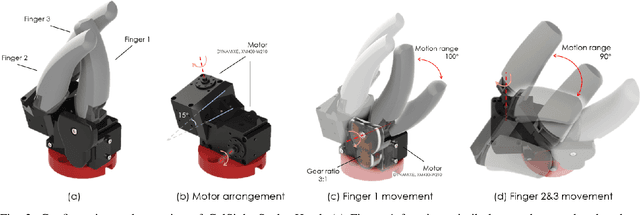
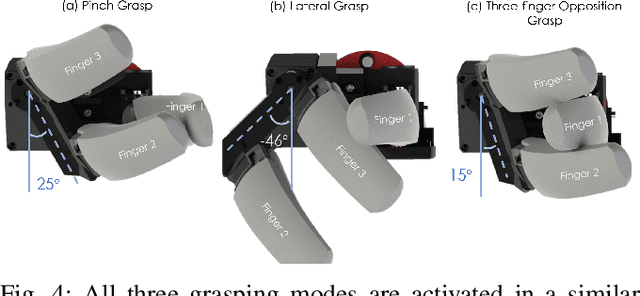
This paper presents GelSight Svelte Hand, a novel 3-finger 2-DoF tactile robotic hand that is capable of performing precision grasps, power grasps, and intermediate grasps. Rich tactile signals are obtained from one camera on each finger, with an extended sensing area similar to the full length of a human finger. Each finger of GelSight Svelte Hand is supported by a semi-rigid endoskeleton and covered with soft silicone materials, which provide both rigidity and compliance. We describe the design, fabrication, functionalities, and tactile sensing capability of GelSight Svelte Hand in this paper. More information is available on our website: \url{https://gelsight-svelte.alanz.info}.
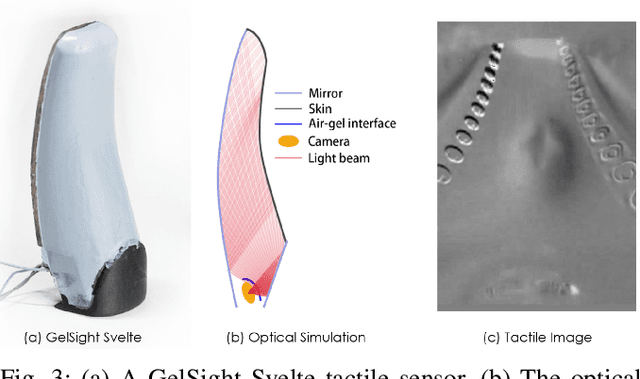
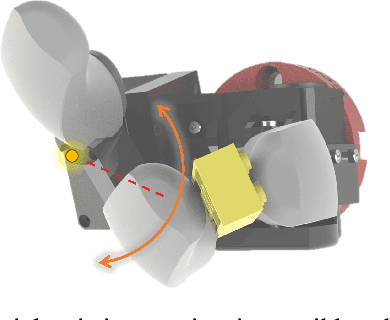
GelSight Svelte: A Human Finger-shaped Single-camera Tactile Robot Finger with Large Sensing Coverage and Proprioceptive Sensing
Sep 19, 2023



Camera-based tactile sensing is a low-cost, popular approach to obtain highly detailed contact geometry information. However, most existing camera-based tactile sensors are fingertip sensors, and longer fingers often require extraneous elements to obtain an extended sensing area similar to the full length of a human finger. Moreover, existing methods to estimate proprioceptive information such as total forces and torques applied on the finger from camera-based tactile sensors are not effective when the contact geometry is complex. We introduce GelSight Svelte, a curved, human finger-sized, single-camera tactile sensor that is capable of both tactile and proprioceptive sensing over a large area. GelSight Svelte uses curved mirrors to achieve the desired shape and sensing coverage. Proprioceptive information, such as the total bending and twisting torques applied on the finger, is reflected as deformations on the flexible backbone of GelSight Svelte, which are also captured by the camera. We train a convolutional neural network to estimate the bending and twisting torques from the captured images. We conduct gel deformation experiments at various locations of the finger to evaluate the tactile sensing capability and proprioceptive sensing accuracy. To demonstrate the capability and potential uses of GelSight Svelte, we conduct an object holding task with three different grasping modes that utilize different areas of the finger. More information is available on our website: https://gelsight-svelte.alanz.info