 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGelSight360: An Omnidirectional Camera-Based Tactile Sensor for Dexterous Robotic Manipulation
Paper and Code
Apr 09, 2023
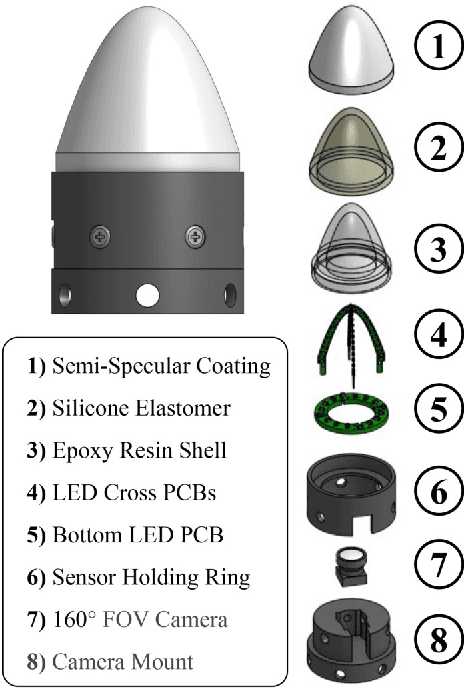


Camera-based tactile sensors have shown great promise in enhancing a robot's ability to perform a variety of dexterous manipulation tasks. Advantages of their use can be attributed to the high resolution tactile data and 3D depth map reconstructions they can provide. Unfortunately, many of these tactile sensors use either a flat sensing surface, sense on only one side of the sensor's body, or have a bulky form-factor, making it difficult to integrate the sensors with a variety of robotic grippers. Of the camera-based sensors that do have all-around, curved sensing surfaces, many cannot provide 3D depth maps; those that do often require optical designs specified to a particular sensor geometry. In this work, we introduce GelSight360, a fingertip-like, omnidirectional, camera-based tactile sensor capable of producing depth maps of objects deforming the sensor's surface. In addition, we introduce a novel cross-LED lighting scheme that can be implemented in different all-around sensor geometries and sizes, allowing the sensor to easily be reconfigured and attached to different grippers of varying DOFs. With this work, we enable roboticists to quickly and easily customize high resolution tactile sensors to fit their robotic system's needs.