 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResults and Lessons Learned from Autonomous Driving Transportation Services in Airfield, Crowded Indoor, and Urban Environments
Mar 02, 2024Autonomous vehicles have been actively investigated over the past few decades. Several recent works show the potential of autonomous driving transportation services in urban environments with impressive experimental results. However, these works note that autonomous vehicles are still occasionally inferior to expert drivers in complex scenarios. Furthermore, they do not focus on the possibilities of autonomous driving transportation services in other areas beyond urban environments. This paper presents the research results and lessons learned from autonomous driving transportation services in airfield, crowded indoor, and urban environments. We discuss how we address several unique challenges in these diverse environments. We also offer an overview of remaining challenges that have not received much attention but must be addressed. This paper aims to share our unique experience to support researchers who are interested in realizing the potential of autonomous vehicles in various real-world environments.
Safe and Efficient Trajectory Optimization for Autonomous Vehicles using B-spline with Incremental Path Flattening
Nov 13, 2023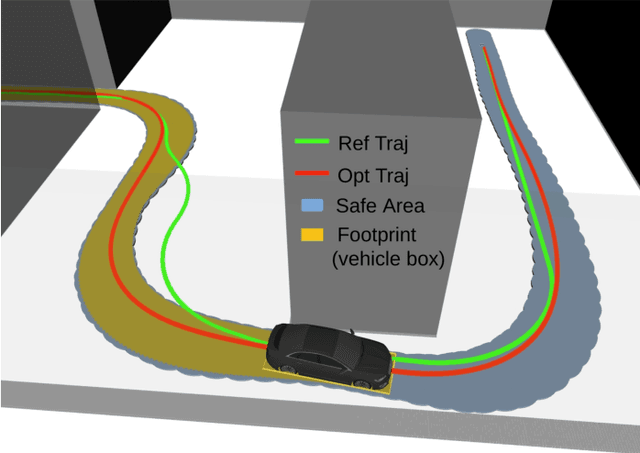
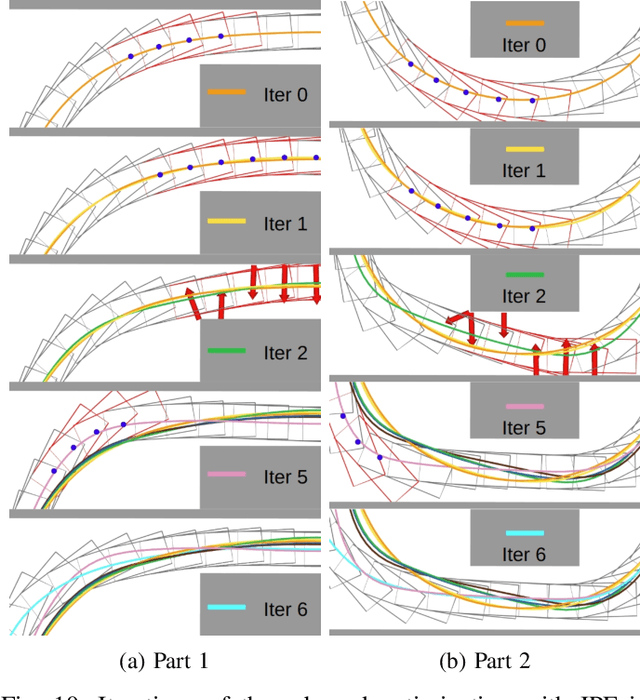
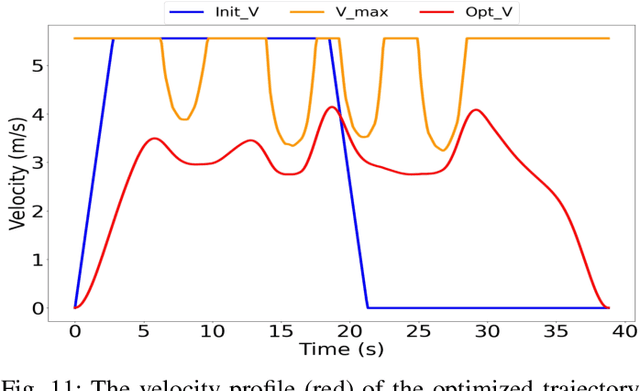
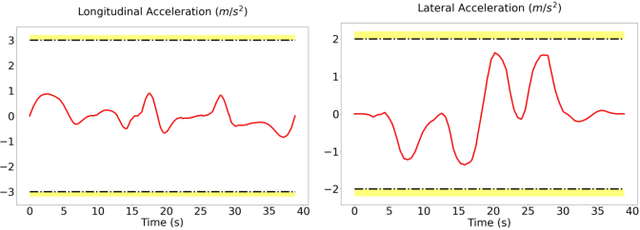
B-spline-based trajectory optimization has been widely used in robot navigation, especially as quadrotor-like vehicles can easily enjoy the advantage of a B-spline curve (e.g. computational efficiency) with its convex hull property for trajectory optimization. Nevertheless, leveraging the B-splined-based optimization algorithm to generate a collision-free trajectory for autonomous vehicles is still challenging because their complex vehicle kinematics make it difficult to use the convex hull property. In this paper, we propose a novel trajectory optimization algorithm for autonomous vehicles that enables the advantage of a B-spline curve into a B-spline-based optimization algorithm by incorporating vehicle kinematics with two methods. An incremental path flattening is a new method that iteratively increases path curvature weight around vehicle collision points to find a collision-free path by reducing swept volume. A new swept volume estimation method can reduce over-approximation of the swept volume and make the vehicle pass through a narrow corridor without losing safety. Furthermore, a clamped B-spline curvature constraint, which can simplify a B-spline curvature constraint, is added with other feasibility constraints (e.g. longitudinal \& lateral velocity and acceleration) for the vehicle kinodynamic constraints. Our experimental results demonstrate that our method outperforms state-of-the-art baselines in various simulated environments and verifies its valid tracking performance with an autonomous vehicle in a real-world scenario.
Occlusion-aware Risk Assessment and Driving Strategy for Autonomous Vehicles Using Simplified Reachability Quantification
Jul 02, 2023



There are several unresolved challenges for autonomous vehicles. One of them is safely navigating among occluded pedestrians and vehicles. Much of the previous work tried to solve this problem by generating phantom cars and assessing their risk. In this paper, motivated by the previous works, we propose an algorithm that efficiently assesses risks of phantom pedestrians/vehicles using Simplified Reachability Quantification. We utilized this occlusion risk to set a speed limit at the risky position when planning the velocity profile of an autonomous vehicle. This allows an autonomous vehicle to safely and efficiently drive in occluded areas. The proposed algorithm was evaluated in various scenarios in the CARLA simulator and it reduced the average collision rate by 6.14X, the discomfort score by 5.03X, while traversal time was increased by 1.48X compared to baseline 1, and computation time was reduced by 20.15X compared to baseline 2.