 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Efficient Trajectory Optimization for Autonomous Vehicles using B-spline with Incremental Path Flattening
Paper and Code
Nov 13, 2023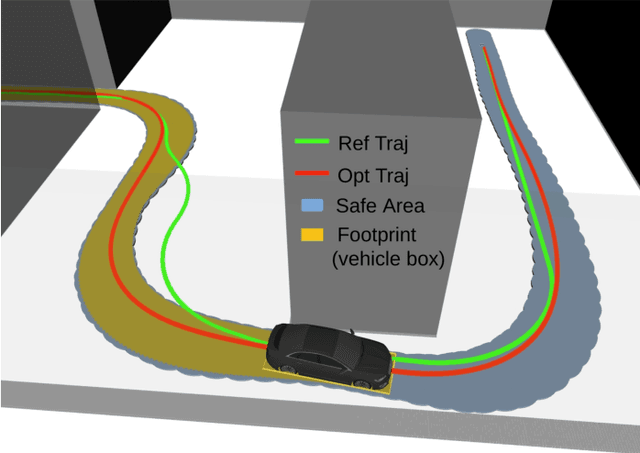
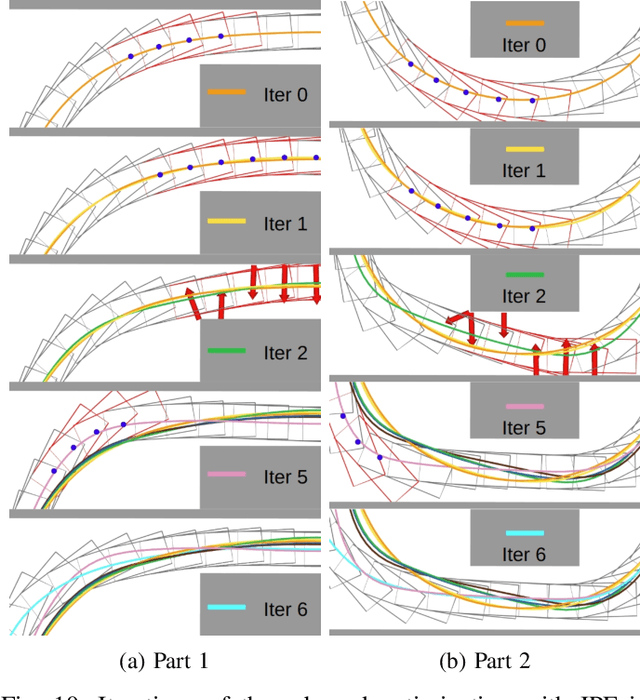
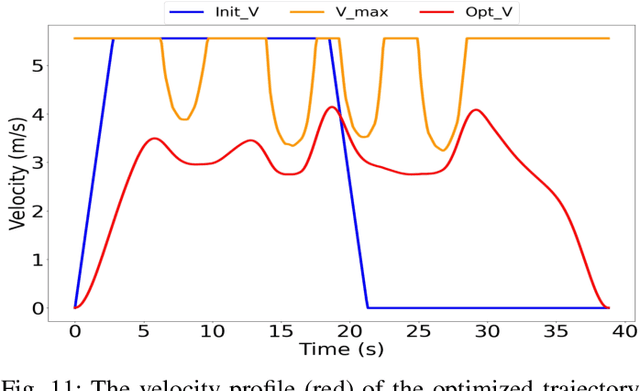
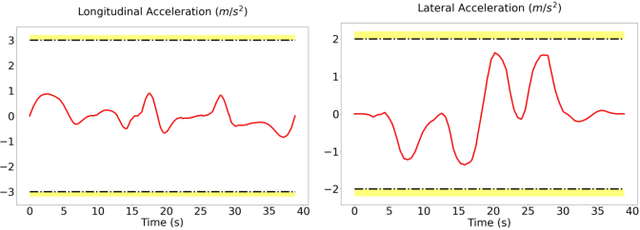
B-spline-based trajectory optimization has been widely used in robot navigation, especially as quadrotor-like vehicles can easily enjoy the advantage of a B-spline curve (e.g. computational efficiency) with its convex hull property for trajectory optimization. Nevertheless, leveraging the B-splined-based optimization algorithm to generate a collision-free trajectory for autonomous vehicles is still challenging because their complex vehicle kinematics make it difficult to use the convex hull property. In this paper, we propose a novel trajectory optimization algorithm for autonomous vehicles that enables the advantage of a B-spline curve into a B-spline-based optimization algorithm by incorporating vehicle kinematics with two methods. An incremental path flattening is a new method that iteratively increases path curvature weight around vehicle collision points to find a collision-free path by reducing swept volume. A new swept volume estimation method can reduce over-approximation of the swept volume and make the vehicle pass through a narrow corridor without losing safety. Furthermore, a clamped B-spline curvature constraint, which can simplify a B-spline curvature constraint, is added with other feasibility constraints (e.g. longitudinal \& lateral velocity and acceleration) for the vehicle kinodynamic constraints. Our experimental results demonstrate that our method outperforms state-of-the-art baselines in various simulated environments and verifies its valid tracking performance with an autonomous vehicle in a real-world scenario.