 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecisionHoldem: Safe Depth-Limited Solving With Diverse Opponents for Imperfect-Information Games
Jan 27, 2022An imperfect-information game is a type of game with asymmetric information. It is more common in life than perfect-information game. Artificial intelligence (AI) in imperfect-information games, such like poker, has made considerable progress and success in recent years. The great success of superhuman poker AI, such as Libratus and Deepstack, attracts researchers to pay attention to poker research. However, the lack of open-source code limits the development of Texas hold'em AI to some extent. This article introduces DecisionHoldem, a high-level AI for heads-up no-limit Texas hold'em with safe depth-limited subgame solving by considering possible ranges of opponent's private hands to reduce the exploitability of the strategy. Experimental results show that DecisionHoldem defeats the strongest openly available agent in heads-up no-limit Texas hold'em poker, namely Slumbot, and a high-level reproduction of Deepstack, viz, Openstack, by more than 730 mbb/h (one-thousandth big blind per round) and 700 mbb/h. Moreover, we release the source codes and tools of DecisionHoldem to promote AI development in imperfect-information games.
CNN Feature boosted SeqSLAM for Real-Time Loop Closure Detection
Apr 17, 2017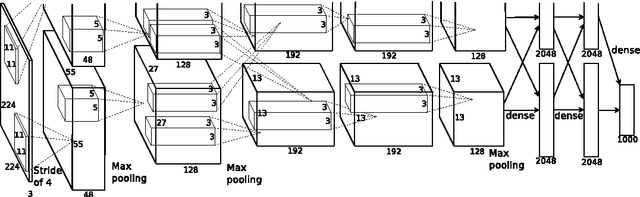
Loop closure detection (LCD) is an indispensable part of simultaneous localization and mapping systems (SLAM); it enables robots to produce a consistent map by recognizing previously visited places. When robots operate over extended periods, robustness to viewpoint and condition changes as well as satisfactory real-time performance become essential requirements for a practical LCD system. This paper presents an approach to directly utilize the outputs at the intermediate layer of a pre-trained convolutional neural network (CNN) as image descriptors. The matching location is determined by matching the image sequences through a method called SeqCNNSLAM. The utility of SeqCNNSLAM is comprehensively evaluated in terms of viewpoint and condition invariance. Experiments show that SeqCNNSLAM outperforms state-of-the-art LCD systems, such as SeqSLAM and Change Removal, in most cases. To allow for the real-time performance of SeqCNNSLAM, an acceleration method, A-SeqCNNSLAM, is established. This method exploits the location relationship between the matching images of adjacent images to reduce the matching range of the current image. Results demonstrate that acceleration of 4-6 is achieved with minimal accuracy degradation, and the method's runtime satisfies the real-time demand. To extend the applicability of A-SeqCNNSLAM to new environments, a method called O-SeqCNNSLAM is established for the online adjustment of the parameters of A-SeqCNNSLAM.