 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparing the Consistency of User Studies Conducted in Simulations and Laboratory Settings
Oct 27, 2024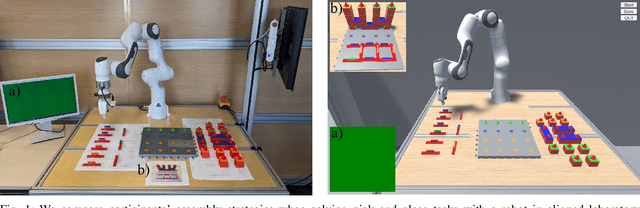
Human-robot collaboration enables highly adaptive co-working. The variety of resulting workflows makes it difficult to measure metrics as, e.g. makespans or idle times for multiple systems and tasks in a comparable manner. This issue can be addressed with virtual commissioning, where arbitrary numbers of non-deterministic human-robot workflows in assembly tasks can be simulated. To this end, data-driven models of human decisions are needed. Gathering the required large corpus of data with on-site user studies is quite time-consuming. In comparison, simulation-based studies (e.g., by crowdsourcing) would allow us to access a large pool of study participants with less effort. To rely on respective study results, human action sequences observed in a browser-based simulation environment must be shown to match those gathered in a laboratory setting. To this end, this work aims to understand to what extent cooperative assembly work in a simulated environment differs from that in an on-site laboratory setting. We show how a simulation environment can be aligned with a laboratory setting in which a robot and a human perform pick-and-place tasks together. A user study (N=29) indicates that participants' assembly decisions and perception of the situation are consistent across these different environments.
Documentation Practices of Artificial Intelligence
Jun 26, 2024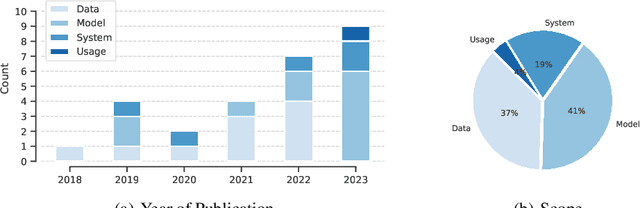
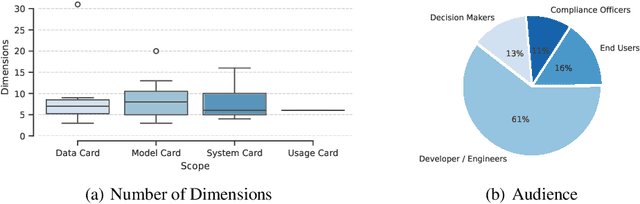
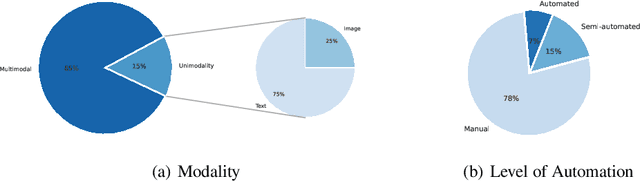
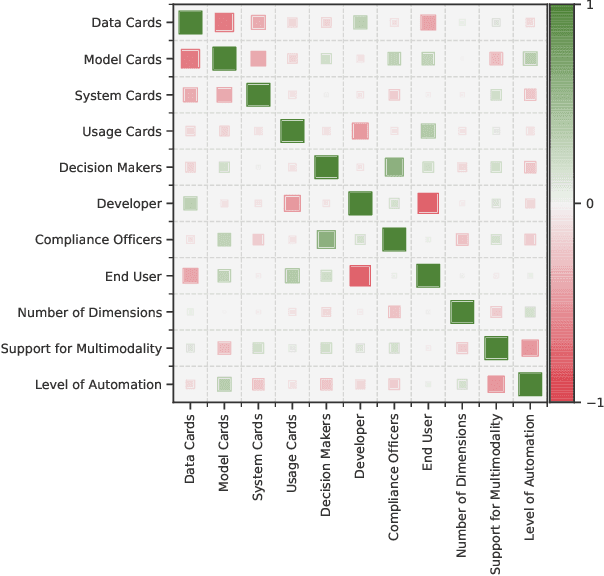
Artificial Intelligence (AI) faces persistent challenges in terms of transparency and accountability, which requires rigorous documentation. Through a literature review on documentation practices, we provide an overview of prevailing trends, persistent issues, and the multifaceted interplay of factors influencing the documentation. Our examination of key characteristics such as scope, target audiences, support for multimodality, and level of automation, highlights a dynamic evolution in documentation practices, underscored by a shift towards a more holistic, engaging, and automated documentation.
OpTC -- A Toolchain for Deployment of Neural Networks on AURIX TC3xx Microcontrollers
Apr 24, 2024The AURIX 2xx and 3xx families of TriCore microcontrollers are widely used in the automotive industry and, recently, also in applications that involve machine learning tasks. Yet, these applications are mainly engineered manually, and only little tool support exists for bringing neural networks to TriCore microcontrollers. Thus, we propose OpTC, an end-to-end toolchain for automatic compression, conversion, code generation, and deployment of neural networks on TC3xx microcontrollers. OpTC supports various types of neural networks and provides compression using layer-wise pruning based on sensitivity analysis for a given neural network. The flexibility in supporting different types of neural networks, such as multi-layer perceptrons (MLP), convolutional neural networks (CNN), and recurrent neural networks (RNN), is shown in case studies for a TC387 microcontroller. Automotive applications for predicting the temperature in electric motors and detecting anomalies are thereby used to demonstrate the effectiveness and the wide range of applications supported by OpTC.
Enabling End-Users to Deploy Flexible Human-Robot Teams to Factories of the Future
Apr 02, 2020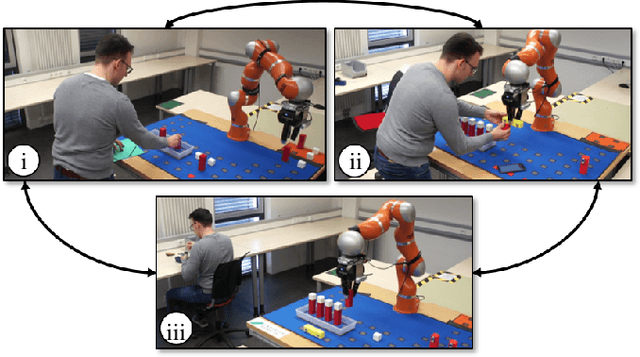
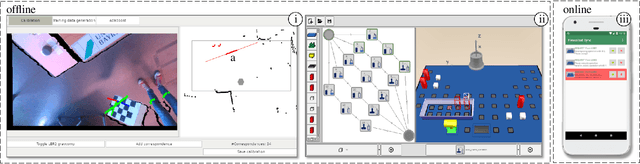
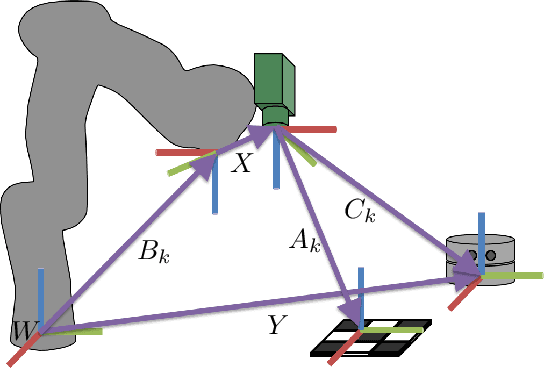
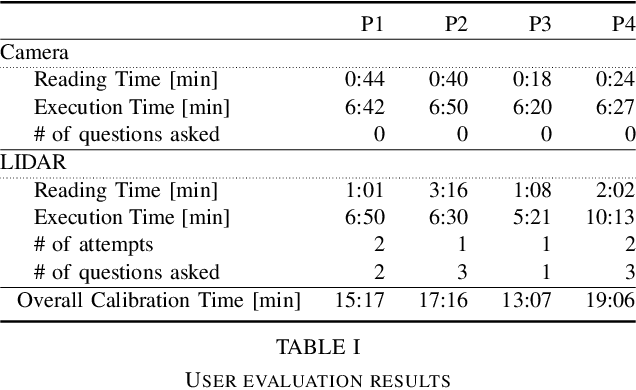
Human-Robot Teams offer the flexibility needed for partial automation in small and medium-sized enterprises (SMEs). They will thus be an integral part of Factories of the Future. Our research targets a particularly flexible teaming mode, where agents share tasks dynamically. Such approaches require cognitive robots with reasoning and sensing capabilities. This results in hardware maintenance demands in terms of sensor calibration. In contrast to intuitive end-user programming, system setup and maintenance are rarely addressed in literature on robot application in SMEs. In this paper, we describe a prototype software toolchain that covers the initial setup, task modelling, and online operation of human-robot teams. We further show, that end-users can setup the system quickly and operate the whole toolchain effortlessly. All in all, this work aims to reduce the concern, that deploying human-robot teams comes with high costs for external expertise.