 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Safe Multi-Agent Control for Signal Temporal Logic Specifications
Jan 10, 2025



Existing methods for safe multi-agent control using logic specifications like Signal Temporal Logic (STL) often face scalability issues. This is because they rely either on single-agent perspectives or on Mixed Integer Linear Programming (MILP)-based planners, which are complex to optimize. These methods have proven to be computationally expensive and inefficient when dealing with a large number of agents. To address these limitations, we present a new scalable approach to multi-agent control in this setting. Our method treats the relationships between agents using a graph structure rather than in terms of a single-agent perspective. Moreover, it combines a multi-agent collision avoidance controller with a Graph Neural Network (GNN) based planner, models the system in a decentralized fashion, and trains on STL-based objectives to generate safe and efficient plans for multiple agents, thereby optimizing the satisfaction of complex temporal specifications while also facilitating multi-agent collision avoidance. Our experiments show that our approach significantly outperforms existing methods that use a state-of-the-art MILP-based planner in terms of scalability and performance. The project website is https://jeappen.com/mastl-gcbf-website/ and the code is at https://github.com/jeappen/mastl-gcbf .
Go-SLAM: Grounded Object Segmentation and Localization with Gaussian Splatting SLAM
Sep 25, 2024



We introduce Go-SLAM, a novel framework that utilizes 3D Gaussian Splatting SLAM to reconstruct dynamic environments while embedding object-level information within the scene representations. This framework employs advanced object segmentation techniques, assigning a unique identifier to each Gaussian splat that corresponds to the object it represents. Consequently, our system facilitates open-vocabulary querying, allowing users to locate objects using natural language descriptions. Furthermore, the framework features an optimal path generation module that calculates efficient navigation paths for robots toward queried objects, considering obstacles and environmental uncertainties. Comprehensive evaluations in various scene settings demonstrate the effectiveness of our approach in delivering high-fidelity scene reconstructions, precise object segmentation, flexible object querying, and efficient robot path planning. This work represents an additional step forward in bridging the gap between 3D scene reconstruction, semantic object understanding, and real-time environment interactions.
DREAM: Decentralized Reinforcement Learning for Exploration and Efficient Energy Management in Multi-Robot Systems
Sep 29, 2023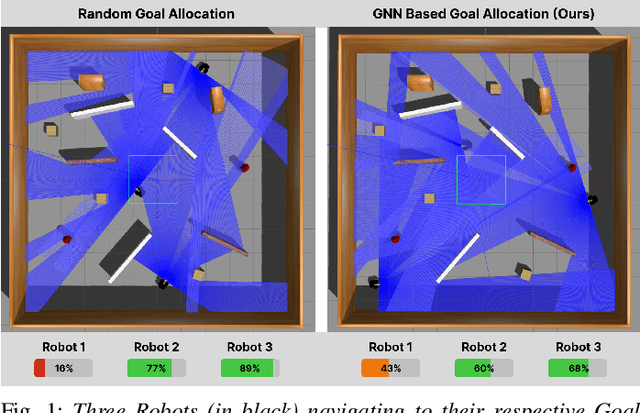
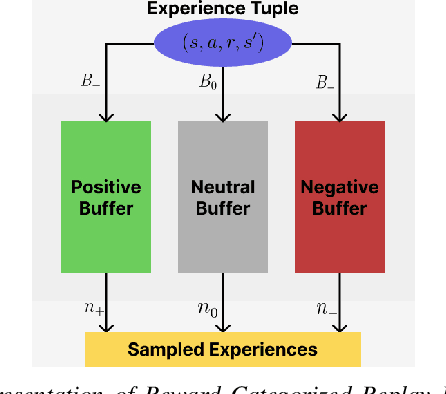
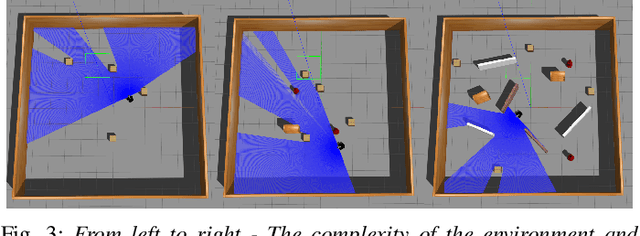
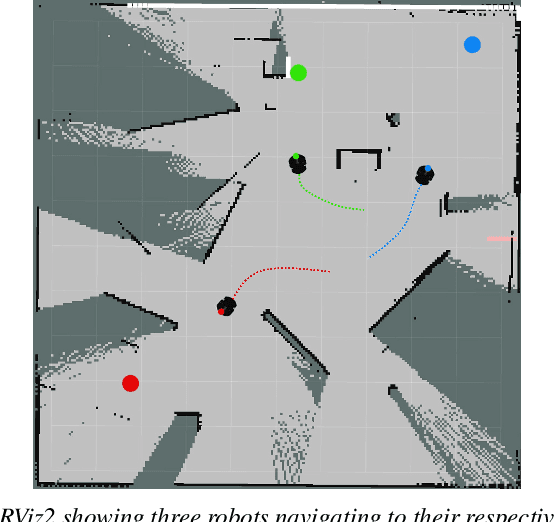
Resource-constrained robots often suffer from energy inefficiencies, underutilized computational abilities due to inadequate task allocation, and a lack of robustness in dynamic environments, all of which strongly affect their performance. This paper introduces DREAM - Decentralized Reinforcement Learning for Exploration and Efficient Energy Management in Multi-Robot Systems, a comprehensive framework that optimizes the allocation of resources for efficient exploration. It advances beyond conventional heuristic-based task planning as observed conventionally. The framework incorporates Operational Range Estimation using Reinforcement Learning to perform exploration and obstacle avoidance in unfamiliar terrains. DREAM further introduces an Energy Consumption Model for goal allocation, thereby ensuring mission completion under constrained resources using a Graph Neural Network. This approach also ensures that the entire Multi-Robot System can survive for an extended period of time for further missions compared to the conventional approach of randomly allocating goals, which compromises one or more agents. Our approach adapts to prioritizing agents in real-time, showcasing remarkable resilience against dynamic environments. This robust solution was evaluated in various simulated environments, demonstrating adaptability and applicability across diverse scenarios. We observed a substantial improvement of about 25% over the baseline method, leading the way for future research in resource-constrained robotics.
DroNeRF: Real-time Multi-agent Drone Pose Optimization for Computing Neural Radiance Fields
Mar 08, 2023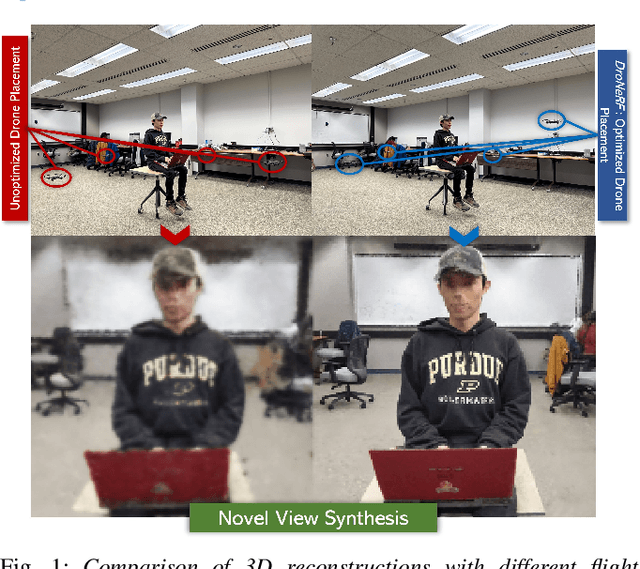
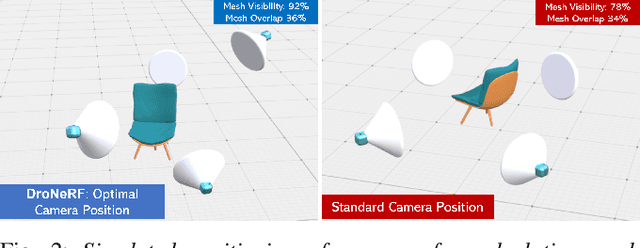
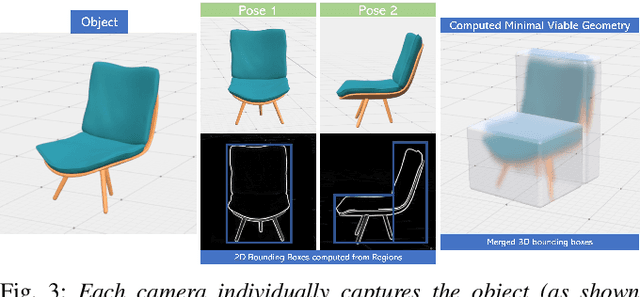
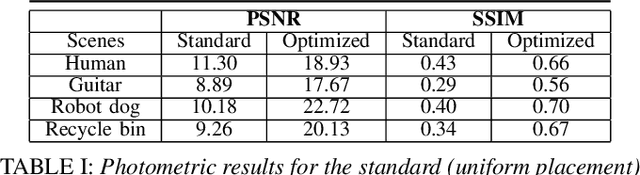
We present a novel optimization algorithm called DroNeRF for the autonomous positioning of monocular camera drones around an object for real-time 3D reconstruction using only a few images. Neural Radiance Fields or NeRF, is a novel view synthesis technique used to generate new views of an object or scene from a set of input images. Using drones in conjunction with NeRF provides a unique and dynamic way to generate novel views of a scene, especially with limited scene capabilities of restricted movements. Our approach focuses on calculating optimized pose for individual drones while solely depending on the object geometry without using any external localization system. The unique camera positioning during the data-capturing phase significantly impacts the quality of the 3D model. To evaluate the quality of our generated novel views, we compute different perceptual metrics like the Peak Signal-to-Noise Ratio (PSNR) and Structural Similarity Index Measure(SSIM). Our work demonstrates the benefit of using an optimal placement of various drones with limited mobility to generate perceptually better results.