 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Utility of 3D Hand Poses for Action Recognition
Mar 14, 2024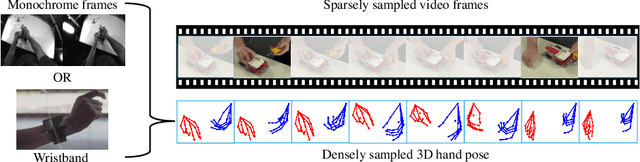
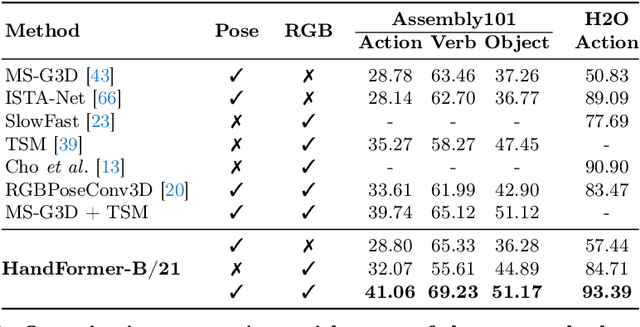
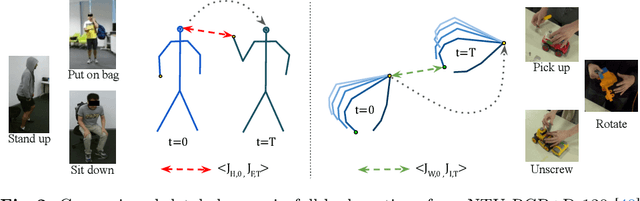
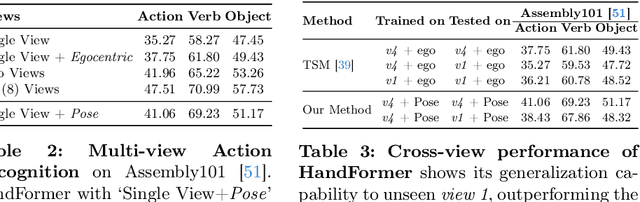
3D hand poses are an under-explored modality for action recognition. Poses are compact yet informative and can greatly benefit applications with limited compute budgets. However, poses alone offer an incomplete understanding of actions, as they cannot fully capture objects and environments with which humans interact. To efficiently model hand-object interactions, we propose HandFormer, a novel multimodal transformer. HandFormer combines 3D hand poses at a high temporal resolution for fine-grained motion modeling with sparsely sampled RGB frames for encoding scene semantics. Observing the unique characteristics of hand poses, we temporally factorize hand modeling and represent each joint by its short-term trajectories. This factorized pose representation combined with sparse RGB samples is remarkably efficient and achieves high accuracy. Unimodal HandFormer with only hand poses outperforms existing skeleton-based methods at 5x fewer FLOPs. With RGB, we achieve new state-of-the-art performance on Assembly101 and H2O with significant improvements in egocentric action recognition.
Opening the Vocabulary of Egocentric Actions
Aug 22, 2023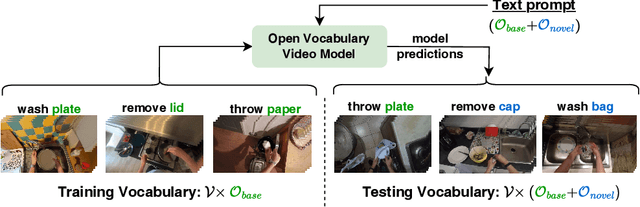
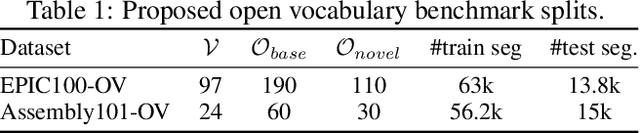
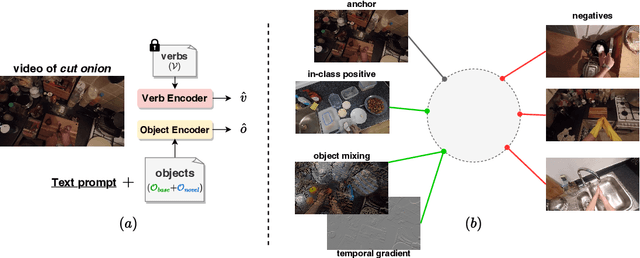
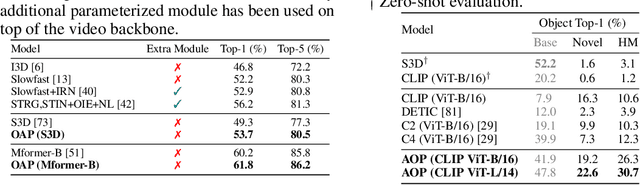
Human actions in egocentric videos are often hand-object interactions composed from a verb (performed by the hand) applied to an object. Despite their extensive scaling up, egocentric datasets still face two limitations - sparsity of action compositions and a closed set of interacting objects. This paper proposes a novel open vocabulary action recognition task. Given a set of verbs and objects observed during training, the goal is to generalize the verbs to an open vocabulary of actions with seen and novel objects. To this end, we decouple the verb and object predictions via an object-agnostic verb encoder and a prompt-based object encoder. The prompting leverages CLIP representations to predict an open vocabulary of interacting objects. We create open vocabulary benchmarks on the EPIC-KITCHENS-100 and Assembly101 datasets; whereas closed-action methods fail to generalize, our proposed method is effective. In addition, our object encoder significantly outperforms existing open-vocabulary visual recognition methods in recognizing novel interacting objects.
Assembly101: A Large-Scale Multi-View Video Dataset for Understanding Procedural Activities
Mar 28, 2022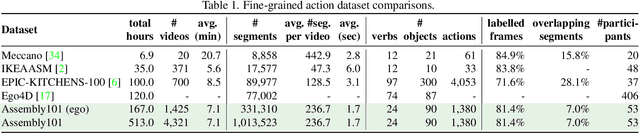



Assembly101 is a new procedural activity dataset featuring 4321 videos of people assembling and disassembling 101 "take-apart" toy vehicles. Participants work without fixed instructions, and the sequences feature rich and natural variations in action ordering, mistakes, and corrections. Assembly101 is the first multi-view action dataset, with simultaneous static (8) and egocentric (4) recordings. Sequences are annotated with more than 100K coarse and 1M fine-grained action segments, and 18M 3D hand poses. We benchmark on three action understanding tasks: recognition, anticipation and temporal segmentation. Additionally, we propose a novel task of detecting mistakes. The unique recording format and rich set of annotations allow us to investigate generalization to new toys, cross-view transfer, long-tailed distributions, and pose vs. appearance. We envision that Assembly101 will serve as a new challenge to investigate various activity understanding problems.
Technical Report: Temporal Aggregate Representations
Jun 15, 2021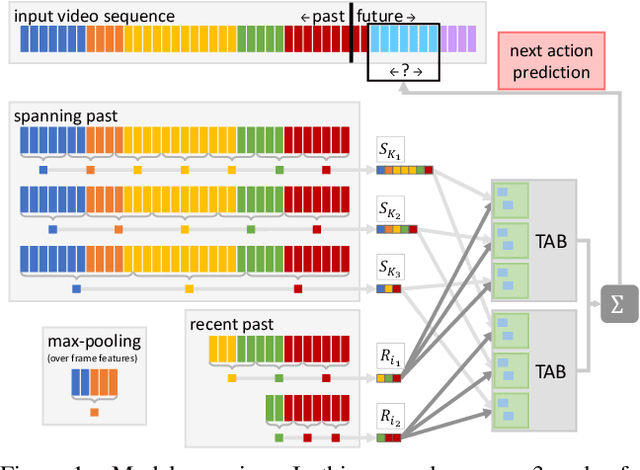

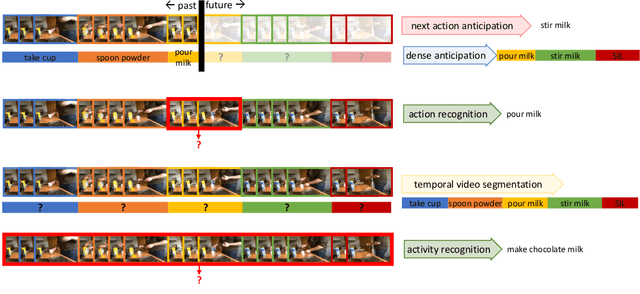
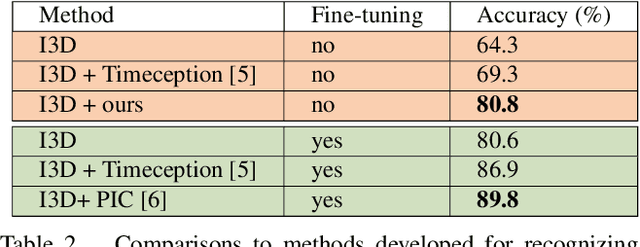
This technical report extends our work presented in [9] with more experiments. In [9], we tackle long-term video understanding, which requires reasoning from current and past or future observations and raises several fundamental questions. How should temporal or sequential relationships be modelled? What temporal extent of information and context needs to be processed? At what temporal scale should they be derived? [9] addresses these questions with a flexible multi-granular temporal aggregation framework. In this report, we conduct further experiments with this framework on different tasks and a new dataset, EPIC-KITCHENS-100.