 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHDI-Former: Hybrid Dynamic Interaction ANN-SNN Transformer for Object Detection Using Frames and Events
Nov 27, 2024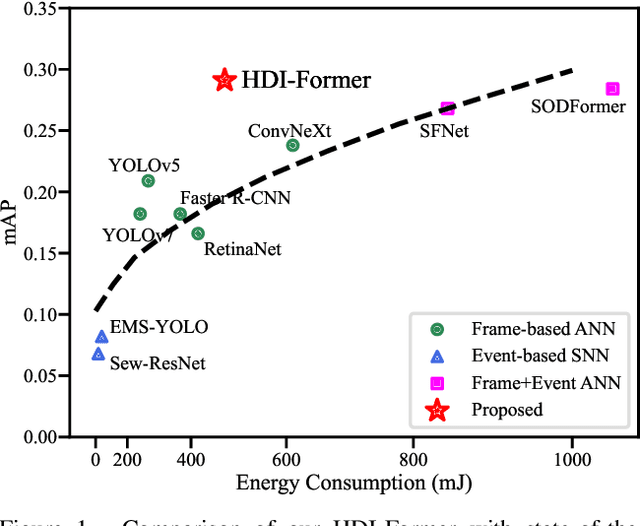
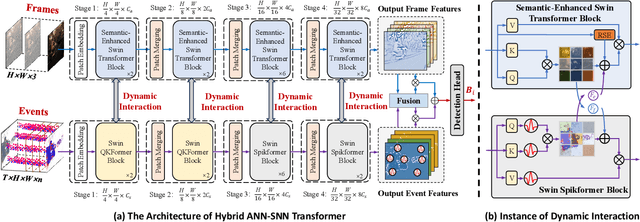

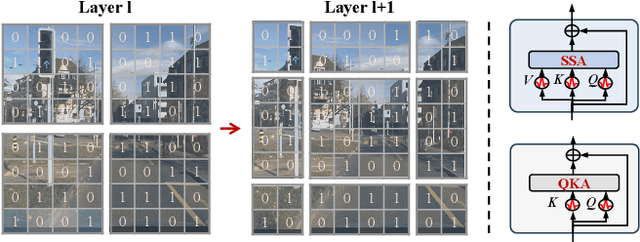
Combining the complementary benefits of frames and events has been widely used for object detection in challenging scenarios. However, most object detection methods use two independent Artificial Neural Network (ANN) branches, limiting cross-modality information interaction across the two visual streams and encountering challenges in extracting temporal cues from event streams with low power consumption. To address these challenges, we propose HDI-Former, a Hybrid Dynamic Interaction ANN-SNN Transformer, marking the first trial to design a directly trained hybrid ANN-SNN architecture for high-accuracy and energy-efficient object detection using frames and events. Technically, we first present a novel semantic-enhanced self-attention mechanism that strengthens the correlation between image encoding tokens within the ANN Transformer branch for better performance. Then, we design a Spiking Swin Transformer branch to model temporal cues from event streams with low power consumption. Finally, we propose a bio-inspired dynamic interaction mechanism between ANN and SNN sub-networks for cross-modality information interaction. The results demonstrate that our HDI-Former outperforms eleven state-of-the-art methods and our four baselines by a large margin. Our SNN branch also shows comparable performance to the ANN with the same architecture while consuming 10.57$\times$ less energy on the DSEC-Detection dataset. Our open-source code is available in the supplementary material.
SODFormer: Streaming Object Detection with Transformer Using Events and Frames
Aug 08, 2023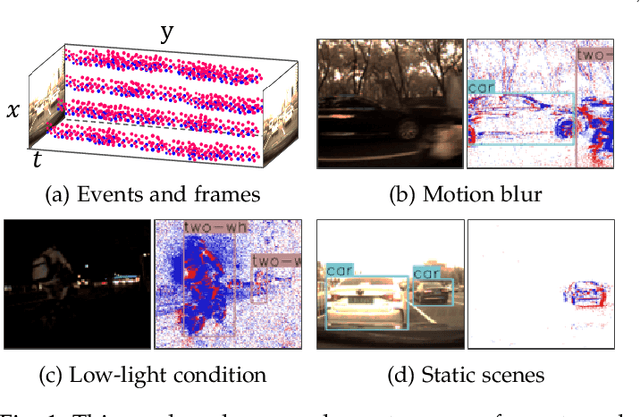
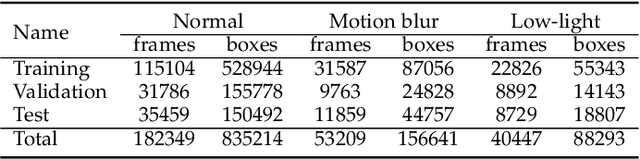
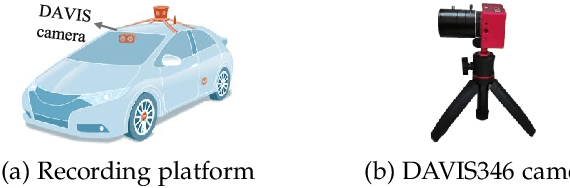

DAVIS camera, streaming two complementary sensing modalities of asynchronous events and frames, has gradually been used to address major object detection challenges (e.g., fast motion blur and low-light). However, how to effectively leverage rich temporal cues and fuse two heterogeneous visual streams remains a challenging endeavor. To address this challenge, we propose a novel streaming object detector with Transformer, namely SODFormer, which first integrates events and frames to continuously detect objects in an asynchronous manner. Technically, we first build a large-scale multimodal neuromorphic object detection dataset (i.e., PKU-DAVIS-SOD) over 1080.1k manual labels. Then, we design a spatiotemporal Transformer architecture to detect objects via an end-to-end sequence prediction problem, where the novel temporal Transformer module leverages rich temporal cues from two visual streams to improve the detection performance. Finally, an asynchronous attention-based fusion module is proposed to integrate two heterogeneous sensing modalities and take complementary advantages from each end, which can be queried at any time to locate objects and break through the limited output frequency from synchronized frame-based fusion strategies. The results show that the proposed SODFormer outperforms four state-of-the-art methods and our eight baselines by a significant margin. We also show that our unifying framework works well even in cases where the conventional frame-based camera fails, e.g., high-speed motion and low-light conditions. Our dataset and code can be available at https://github.com/dianzl/SODFormer.