 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Imitation Learning via Boosting
Apr 12, 2024
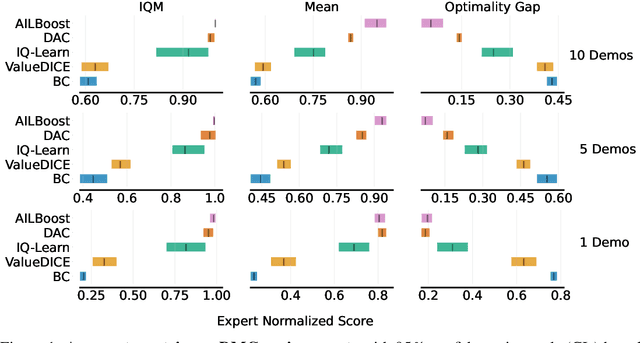
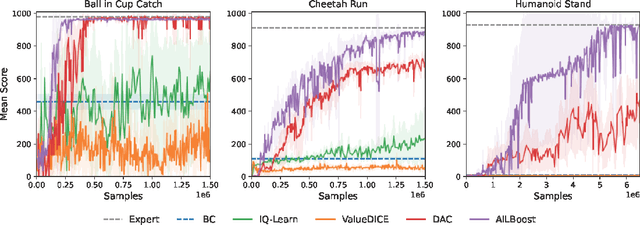
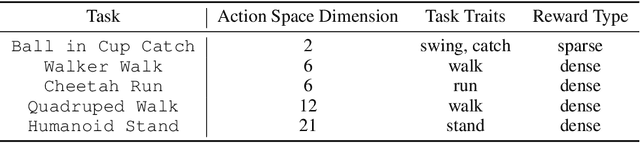
Adversarial imitation learning (AIL) has stood out as a dominant framework across various imitation learning (IL) applications, with Discriminator Actor Critic (DAC) (Kostrikov et al.,, 2019) demonstrating the effectiveness of off-policy learning algorithms in improving sample efficiency and scalability to higher-dimensional observations. Despite DAC's empirical success, the original AIL objective is on-policy and DAC's ad-hoc application of off-policy training does not guarantee successful imitation (Kostrikov et al., 2019; 2020). Follow-up work such as ValueDICE (Kostrikov et al., 2020) tackles this issue by deriving a fully off-policy AIL objective. Instead in this work, we develop a novel and principled AIL algorithm via the framework of boosting. Like boosting, our new algorithm, AILBoost, maintains an ensemble of properly weighted weak learners (i.e., policies) and trains a discriminator that witnesses the maximum discrepancy between the distributions of the ensemble and the expert policy. We maintain a weighted replay buffer to represent the state-action distribution induced by the ensemble, allowing us to train discriminators using the entire data collected so far. In the weighted replay buffer, the contribution of the data from older policies are properly discounted with the weight computed based on the boosting framework. Empirically, we evaluate our algorithm on both controller state-based and pixel-based environments from the DeepMind Control Suite. AILBoost outperforms DAC on both types of environments, demonstrating the benefit of properly weighting replay buffer data for off-policy training. On state-based environments, DAC outperforms ValueDICE and IQ-Learn (Gary et al., 2021), achieving competitive performance with as little as one expert trajectory.
Mitigating Covariate Shift in Imitation Learning via Offline Data Without Great Coverage
Jun 14, 2021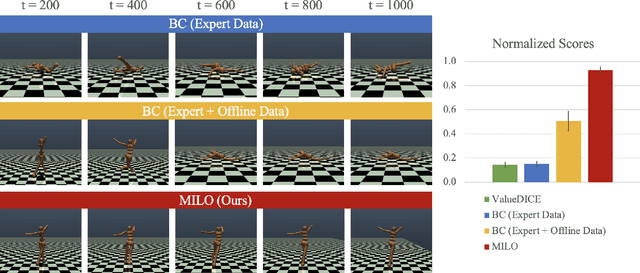
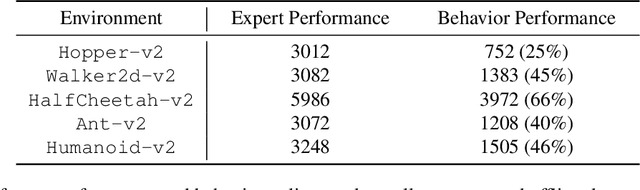
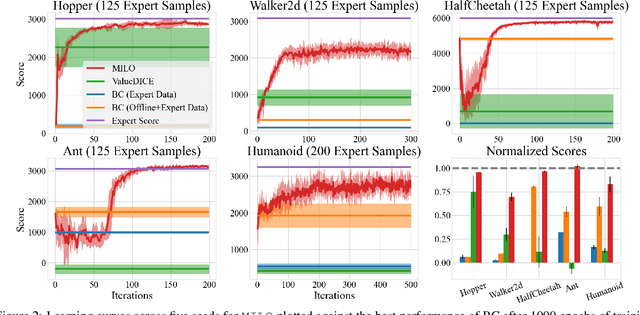
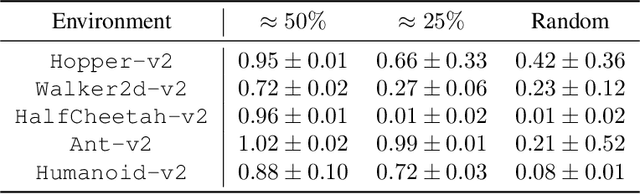
This paper studies offline Imitation Learning (IL) where an agent learns to imitate an expert demonstrator without additional online environment interactions. Instead, the learner is presented with a static offline dataset of state-action-next state transition triples from a potentially less proficient behavior policy. We introduce Model-based IL from Offline data (MILO): an algorithmic framework that utilizes the static dataset to solve the offline IL problem efficiently both in theory and in practice. In theory, even if the behavior policy is highly sub-optimal compared to the expert, we show that as long as the data from the behavior policy provides sufficient coverage on the expert state-action traces (and with no necessity for a global coverage over the entire state-action space), MILO can provably combat the covariate shift issue in IL. Complementing our theory results, we also demonstrate that a practical implementation of our approach mitigates covariate shift on benchmark MuJoCo continuous control tasks. We demonstrate that with behavior policies whose performances are less than half of that of the expert, MILO still successfully imitates with an extremely low number of expert state-action pairs while traditional offline IL method such as behavior cloning (BC) fails completely. Source code is provided at https://github.com/jdchang1/milo.