 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Explainability via Feasible Concept Sets Generator
May 29, 2024



A long-standing dilemma prevents the broader application of explanation methods: general applicability and inference speed. On the one hand, existing model-agnostic explanation methods usually make minimal pre-assumptions about the prediction models to be explained. Still, they require additional queries to the model through propagation or back-propagation to approximate the models' behaviors, resulting in slow inference and hindering their use in time-sensitive tasks. On the other hand, various model-dependent explanations have been proposed that achieve low-cost, fast inference but at the expense of limiting their applicability to specific model structures. In this study, we bridge the gap between the universality of model-agnostic approaches and the efficiency of model-specific approaches by proposing a novel framework without assumptions on the prediction model's structures, achieving high efficiency during inference and allowing for real-time explanations. To achieve this, we first define explanations through a set of human-comprehensible concepts and propose a framework to elucidate model predictions via minimal feasible concept sets. Second, we show that a minimal feasible set generator can be learned as a companion explainer to the prediction model, generating explanations for predictions. Finally, we validate this framework by implementing a novel model-agnostic method that provides robust explanations while facilitating real-time inference. Our claims are substantiated by comprehensive experiments, highlighting the effectiveness and efficiency of our approach.
Decentralized federated learning methods for reducing communication cost and energy consumption in UAV networks
Apr 13, 2023Unmanned aerial vehicles (UAV) or drones play many roles in a modern smart city such as the delivery of goods, mapping real-time road traffic and monitoring pollution. The ability of drones to perform these functions often requires the support of machine learning technology. However, traditional machine learning models for drones encounter data privacy problems, communication costs and energy limitations. Federated Learning, an emerging distributed machine learning approach, is an excellent solution to address these issues. Federated learning (FL) allows drones to train local models without transmitting raw data. However, existing FL requires a central server to aggregate the trained model parameters of the UAV. A failure of the central server can significantly impact the overall training. In this paper, we propose two aggregation methods: Commutative FL and Alternate FL, based on the existing architecture of decentralised Federated Learning for UAV Networks (DFL-UN) by adding a unique aggregation method of decentralised FL. Those two methods can effectively control energy consumption and communication cost by controlling the number of local training epochs, local communication, and global communication. The simulation results of the proposed training methods are also presented to verify the feasibility and efficiency of the architecture compared with two benchmark methods (e.g. standard machine learning training and standard single aggregation server training). The simulation results show that the proposed methods outperform the benchmark methods in terms of operational stability, energy consumption and communication cost.
Negative Flux Aggregation to Estimate Feature Attributions
Jan 17, 2023



There are increasing demands for understanding deep neural networks' (DNNs) behavior spurred by growing security and/or transparency concerns. Due to multi-layer nonlinearity of the deep neural network architectures, explaining DNN predictions still remains as an open problem, preventing us from gaining a deeper understanding of the mechanisms. To enhance the explainability of DNNs, we estimate the input feature's attributions to the prediction task using divergence and flux. Inspired by the divergence theorem in vector analysis, we develop a novel Negative Flux Aggregation (NeFLAG) formulation and an efficient approximation algorithm to estimate attribution map. Unlike the previous techniques, ours doesn't rely on fitting a surrogate model nor need any path integration of gradients. Both qualitative and quantitative experiments demonstrate a superior performance of NeFLAG in generating more faithful attribution maps than the competing methods.
Learning Compact Features via In-Training Representation Alignment
Nov 23, 2022



Deep neural networks (DNNs) for supervised learning can be viewed as a pipeline of the feature extractor (i.e., last hidden layer) and a linear classifier (i.e., output layer) that are trained jointly with stochastic gradient descent (SGD) on the loss function (e.g., cross-entropy). In each epoch, the true gradient of the loss function is estimated using a mini-batch sampled from the training set and model parameters are then updated with the mini-batch gradients. Although the latter provides an unbiased estimation of the former, they are subject to substantial variances derived from the size and number of sampled mini-batches, leading to noisy and jumpy updates. To stabilize such undesirable variance in estimating the true gradients, we propose In-Training Representation Alignment (ITRA) that explicitly aligns feature distributions of two different mini-batches with a matching loss in the SGD training process. We also provide a rigorous analysis of the desirable effects of the matching loss on feature representation learning: (1) extracting compact feature representation; (2) reducing over-adaption on mini-batches via an adaptive weighting mechanism; and (3) accommodating to multi-modalities. Finally, we conduct large-scale experiments on both image and text classifications to demonstrate its superior performance to the strong baselines.
Improving Adversarial Robustness via Probabilistically Compact Loss with Logit Constraints
Dec 14, 2020
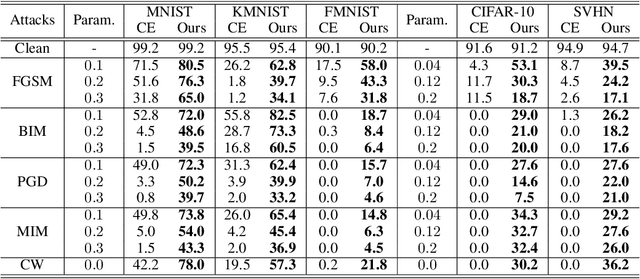
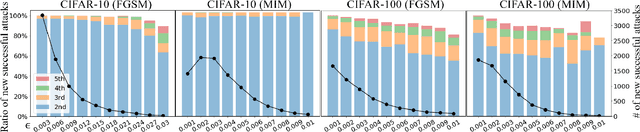
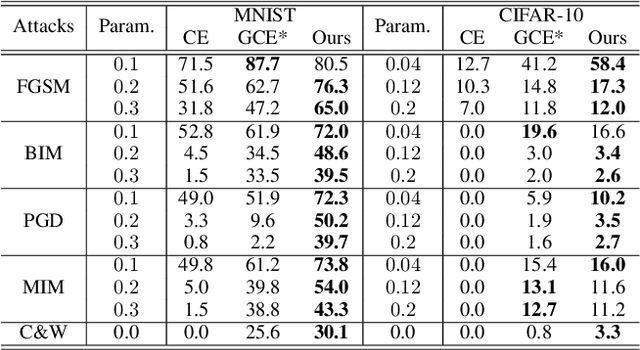
Convolutional neural networks (CNNs) have achieved state-of-the-art performance on various tasks in computer vision. However, recent studies demonstrate that these models are vulnerable to carefully crafted adversarial samples and suffer from a significant performance drop when predicting them. Many methods have been proposed to improve adversarial robustness (e.g., adversarial training and new loss functions to learn adversarially robust feature representations). Here we offer a unique insight into the predictive behavior of CNNs that they tend to misclassify adversarial samples into the most probable false classes. This inspires us to propose a new Probabilistically Compact (PC) loss with logit constraints which can be used as a drop-in replacement for cross-entropy (CE) loss to improve CNN's adversarial robustness. Specifically, PC loss enlarges the probability gaps between true class and false classes meanwhile the logit constraints prevent the gaps from being melted by a small perturbation. We extensively compare our method with the state-of-the-art using large scale datasets under both white-box and black-box attacks to demonstrate its effectiveness. The source codes are available from the following url: https://github.com/xinli0928/PC-LC.
Explainable Recommendation via Interpretable Feature Mapping and Evaluation of Explainability
Jul 12, 2020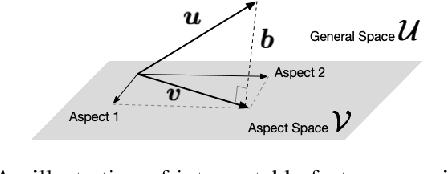
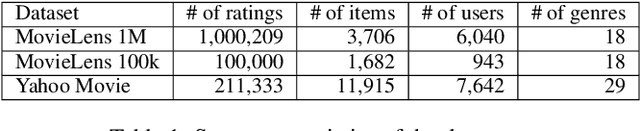
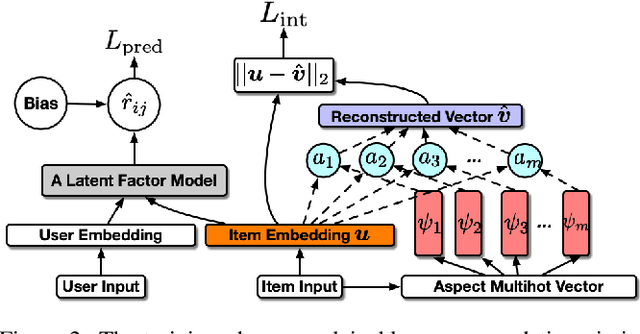

Latent factor collaborative filtering (CF) has been a widely used technique for recommender system by learning the semantic representations of users and items. Recently, explainable recommendation has attracted much attention from research community. However, trade-off exists between explainability and performance of the recommendation where metadata is often needed to alleviate the dilemma. We present a novel feature mapping approach that maps the uninterpretable general features onto the interpretable aspect features, achieving both satisfactory accuracy and explainability in the recommendations by simultaneous minimization of rating prediction loss and interpretation loss. To evaluate the explainability, we propose two new evaluation metrics specifically designed for aspect-level explanation using surrogate ground truth. Experimental results demonstrate a strong performance in both recommendation and explaining explanation, eliminating the need for metadata. Code is available from https://github.com/pd90506/AMCF.
* Proceedings of the Twenty-Ninth International Joint Conference on Artificial Intelligence (IJCAI)
Defending against adversarial attacks on medical imaging AI system, classification or detection?
Jun 24, 2020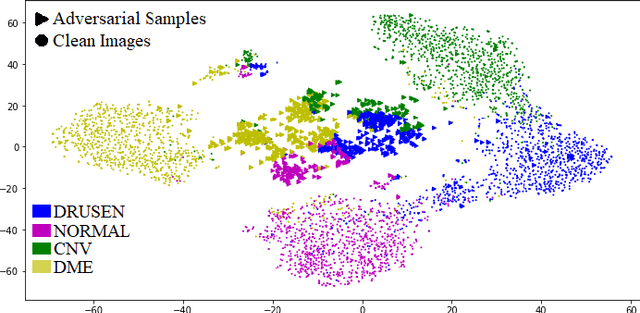
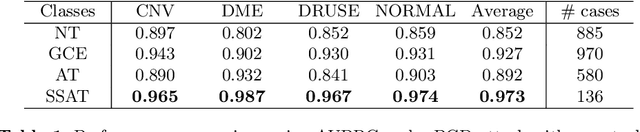


Medical imaging AI systems such as disease classification and segmentation are increasingly inspired and transformed from computer vision based AI systems. Although an array of adversarial training and/or loss function based defense techniques have been developed and proved to be effective in computer vision, defending against adversarial attacks on medical images remains largely an uncharted territory due to the following unique challenges: 1) label scarcity in medical images significantly limits adversarial generalizability of the AI system; 2) vastly similar and dominant fore- and background in medical images make it hard samples for learning the discriminating features between different disease classes; and 3) crafted adversarial noises added to the entire medical image as opposed to the focused organ target can make clean and adversarial examples more discriminate than that between different disease classes. In this paper, we propose a novel robust medical imaging AI framework based on Semi-Supervised Adversarial Training (SSAT) and Unsupervised Adversarial Detection (UAD), followed by designing a new measure for assessing systems adversarial risk. We systematically demonstrate the advantages of our robust medical imaging AI system over the existing adversarial defense techniques under diverse real-world settings of adversarial attacks using a benchmark OCT imaging data set.
On the Learning Property of Logistic and Softmax Losses for Deep Neural Networks
Mar 04, 2020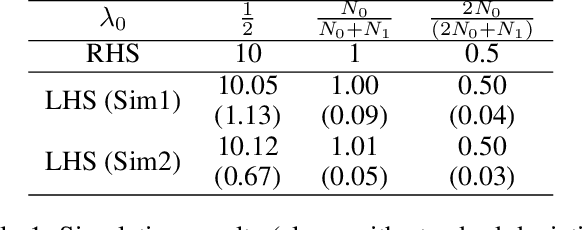
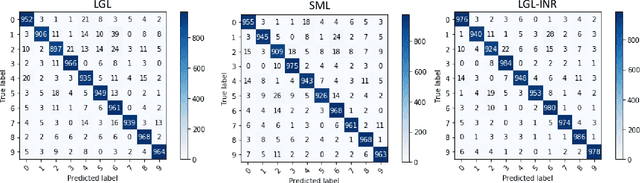
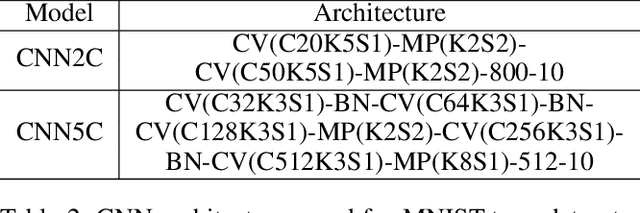
Deep convolutional neural networks (CNNs) trained with logistic and softmax losses have made significant advancement in visual recognition tasks in computer vision. When training data exhibit class imbalances, the class-wise reweighted version of logistic and softmax losses are often used to boost performance of the unweighted version. In this paper, motivated to explain the reweighting mechanism, we explicate the learning property of those two loss functions by analyzing the necessary condition (e.g., gradient equals to zero) after training CNNs to converge to a local minimum. The analysis immediately provides us explanations for understanding (1) quantitative effects of the class-wise reweighting mechanism: deterministic effectiveness for binary classification using logistic loss yet indeterministic for multi-class classification using softmax loss; (2) disadvantage of logistic loss for single-label multi-class classification via one-vs.-all approach, which is due to the averaging effect on predicted probabilities for the negative class (e.g., non-target classes) in the learning process. With the disadvantage and advantage of logistic loss disentangled, we thereafter propose a novel reweighted logistic loss for multi-class classification. Our simple yet effective formulation improves ordinary logistic loss by focusing on learning hard non-target classes (target vs. non-target class in one-vs.-all) and turned out to be competitive with softmax loss. We evaluate our method on several benchmark datasets to demonstrate its effectiveness.
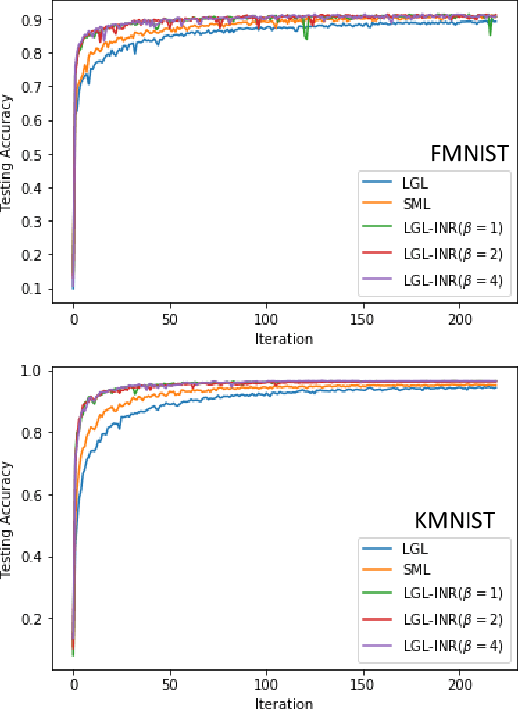
Improve SGD Training via Aligning Mini-batches
Feb 27, 2020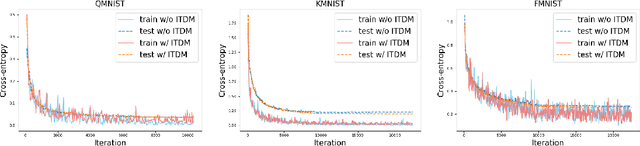
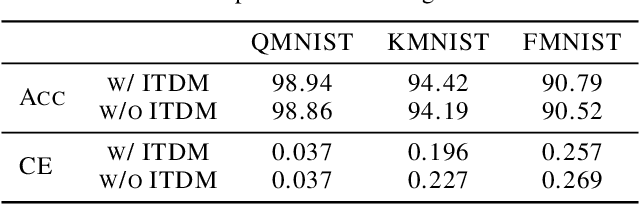
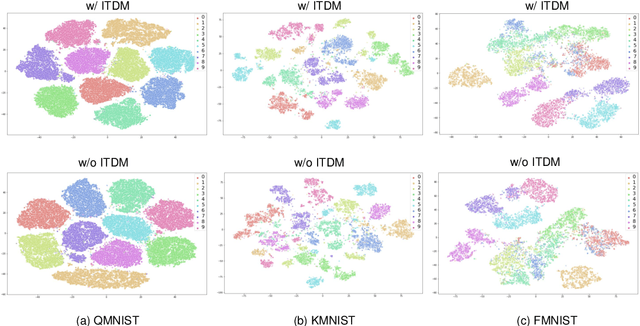
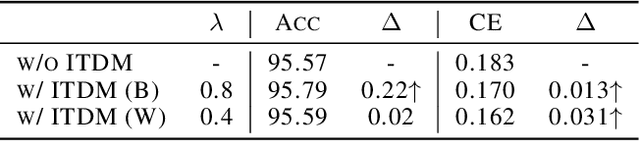
Deep neural networks (DNNs) for supervised learning can be viewed as a pipeline of a feature extractor (i.e. last hidden layer) and a linear classifier (i.e. output layer) that is trained jointly with stochastic gradient descent (SGD). In each iteration of SGD, a mini-batch from the training data is sampled and the true gradient of the loss function is estimated as the noisy gradient calculated on this mini-batch. From the feature learning perspective, the feature extractor should be updated to learn meaningful features with respect to the entire data, and reduce the accommodation to noise in the mini-batch. With this motivation, we propose In-Training Distribution Matching (ITDM) to improve DNN training and reduce overfitting. Specifically, along with the loss function, ITDM regularizes the feature extractor by matching the moments of distributions of different mini-batches in each iteration of SGD, which is fulfilled by minimizing the maximum mean discrepancy. As such, ITDM does not assume any explicit parametric form of data distribution in the latent feature space. Extensive experiments are conducted to demonstrate the effectiveness of our proposed strategy.