 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProf. Robot: Differentiable Robot Rendering Without Static and Self-Collisions
Mar 17, 2025



Differentiable rendering has gained significant attention in the field of robotics, with differentiable robot rendering emerging as an effective paradigm for learning robotic actions from image-space supervision. However, the lack of physical world perception in this approach may lead to potential collisions during action optimization. In this work, we introduce a novel improvement on previous efforts by incorporating physical awareness of collisions through the learning of a neural robotic collision classifier. This enables the optimization of actions that avoid collisions with static, non-interactable environments as well as the robot itself. To facilitate effective gradient optimization with the classifier, we identify the underlying issue and propose leveraging Eikonal regularization to ensure consistent gradients for optimization. Our solution can be seamlessly integrated into existing differentiable robot rendering frameworks, utilizing gradients for optimization and providing a foundation for future applications of differentiable rendering in robotics with improved reliability of interactions with the physical world. Both qualitative and quantitative experiments demonstrate the necessity and effectiveness of our method compared to previous solutions.
SAM-6D: Segment Anything Model Meets Zero-Shot 6D Object Pose Estimation
Nov 27, 2023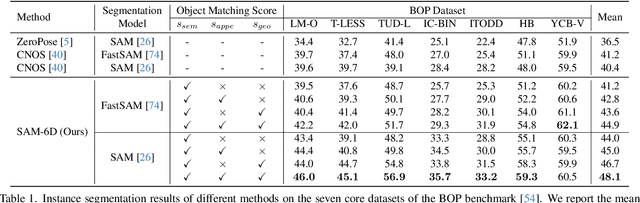
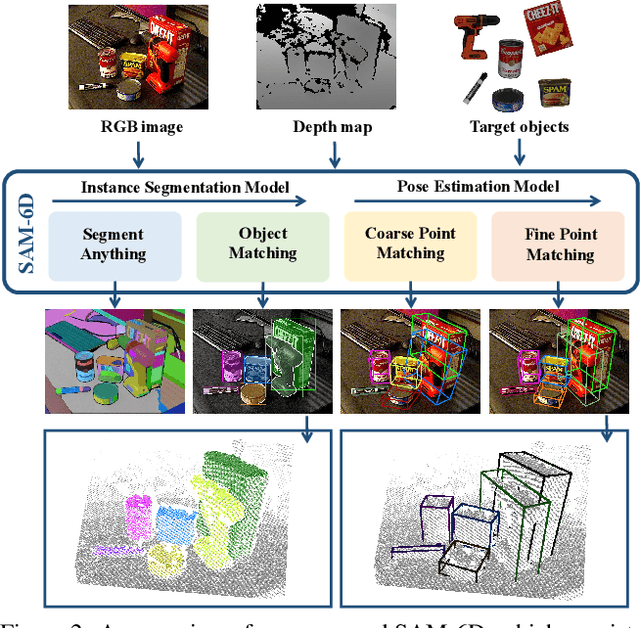
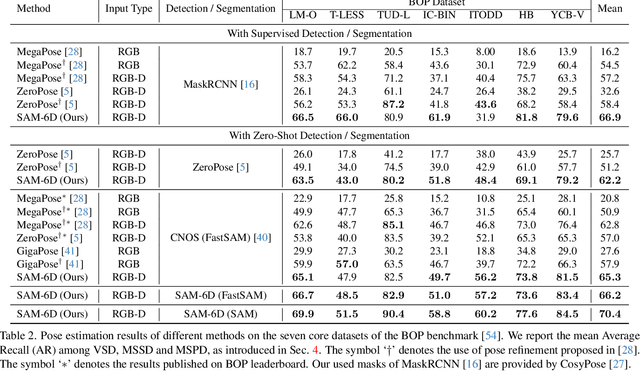
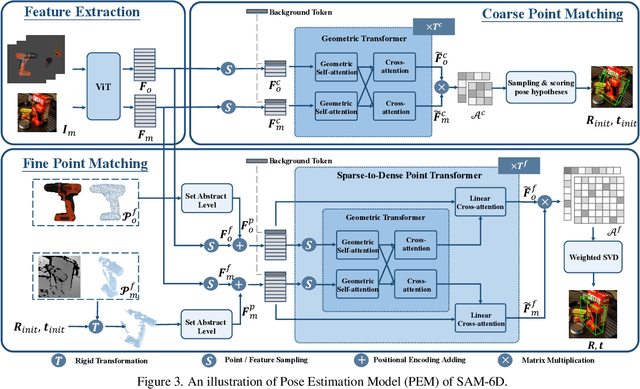
Zero-shot 6D object pose estimation involves the detection of novel objects with their 6D poses in cluttered scenes, presenting significant challenges for model generalizability. Fortunately, the recent Segment Anything Model (SAM) has showcased remarkable zero-shot transfer performance, which provides a promising solution to tackle this task. Motivated by this, we introduce SAM-6D, a novel framework designed to realize the task through two steps, including instance segmentation and pose estimation. Given the target objects, SAM-6D employs two dedicated sub-networks, namely Instance Segmentation Model (ISM) and Pose Estimation Model (PEM), to perform these steps on cluttered RGB-D images. ISM takes SAM as an advanced starting point to generate all possible object proposals and selectively preserves valid ones through meticulously crafted object matching scores in terms of semantics, appearance and geometry. By treating pose estimation as a partial-to-partial point matching problem, PEM performs a two-stage point matching process featuring a novel design of background tokens to construct dense 3D-3D correspondence, ultimately yielding the pose estimates. Without bells and whistles, SAM-6D outperforms the existing methods on the seven core datasets of the BOP Benchmark for both instance segmentation and pose estimation of novel objects.