 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuro-Symbolic Multitasking: A Unified Framework for Discovering Generalizable Solutions to PDE Families
Feb 12, 2026Solving Partial Differential Equations (PDEs) is fundamental to numerous scientific and engineering disciplines. A common challenge arises from solving the PDE families, which are characterized by sharing an identical mathematical structure but varying in specific parameters. Traditional numerical methods, such as the finite element method, need to independently solve each instance within a PDE family, which incurs massive computational cost. On the other hand, while recent advancements in machine learning PDE solvers offer impressive computational speed and accuracy, their inherent ``black-box" nature presents a considerable limitation. These methods primarily yield numerical approximations, thereby lacking the crucial interpretability provided by analytical expressions, which are essential for deeper scientific insight. To address these limitations, we propose a neuro-assisted multitasking symbolic PDE solver framework for PDE family solving, dubbed NMIPS. In particular, we employ multifactorial optimization to simultaneously discover the analytical solutions of PDEs. To enhance computational efficiency, we devise an affine transfer method by transferring learned mathematical structures among PDEs in a family, avoiding solving each PDE from scratch. Experimental results across multiple cases demonstrate promising improvements over existing baselines, achieving up to a $\sim$35.7% increase in accuracy while providing interpretable analytical solutions.
Enhancing Large-scale UAV Route Planing with Global and Local Features via Reinforcement Graph Fusion
Dec 20, 2024Numerous remarkable advancements have been made in accuracy, speed, and parallelism for solving the Unmanned Aerial Vehicle Route Planing (UAVRP). However, existing UAVRP solvers face challenges when attempting to scale effectively and efficiently for larger instances. In this paper, we present a generalization framework that enables current UAVRP solvers to robustly extend their capabilities to larger instances, accommodating up to 10,000 points, using widely recognized test sets. The UAVRP under a large number of patrol points is a typical large-scale TSP problem.Our proposed framework comprises three distinct steps. Firstly, we employ Delaunay triangulation to extract subgraphs from large instances while preserving global features. Secondly, we utilize an embedded TSP solver to obtain sub-results, followed by graph fusion. Finally, we implement a decoding strategy customizable to the user's requirements, resulting in high-quality solutions, complemented by a warming-up process for the heatmap. To demonstrate the flexibility of our approach, we integrate two representative TSP solvers into our framework and conduct a comprehensive comparative analysis against existing algorithms using large TSP benchmark datasets. The results unequivocally demonstrate that our framework efficiently scales existing TSP solvers to handle large instances and consistently outperforms state-of-the-art (SOTA) methods. Furthermore, since our proposed framework does not necessitate additional training or fine-tuning, we believe that its generality can significantly advance research on end-to-end UAVRP solvers, enabling the application of a broader range of methods to real-world scenarios.
NexusSplats: Efficient 3D Gaussian Splatting in the Wild
Nov 26, 2024While 3D Gaussian Splatting (3DGS) has recently demonstrated remarkable rendering quality and efficiency in 3D scene reconstruction, it struggles with varying lighting conditions and incidental occlusions in real-world scenarios. To accommodate varying lighting conditions, existing 3DGS extensions apply color mapping to the massive Gaussian primitives with individually optimized appearance embeddings. To handle occlusions, they predict pixel-wise uncertainties via 2D image features for occlusion capture. Nevertheless, such massive color mapping and pixel-wise uncertainty prediction strategies suffer from not only additional computational costs but also coarse-grained lighting and occlusion handling. In this work, we propose a nexus kernel-driven approach, termed NexusSplats, for efficient and finer 3D scene reconstruction under complex lighting and occlusion conditions. In particular, NexusSplats leverages a novel light decoupling strategy where appearance embeddings are optimized based on nexus kernels instead of massive Gaussian primitives, thus accelerating reconstruction speeds while ensuring local color consistency for finer textures. Additionally, a Gaussian-wise uncertainty mechanism is developed, aligning 3D structures with 2D image features for fine-grained occlusion handling. Experimental results demonstrate that NexusSplats achieves state-of-the-art rendering quality while reducing reconstruction time by up to 70.4% compared to the current best in quality.
An Efficient Dynamic Resource Allocation Framework for Evolutionary Bilevel Optimization
Oct 31, 2024Bilevel optimization problems are characterized by an interactive hierarchical structure, where the upper level seeks to optimize its strategy while simultaneously considering the response of the lower level. Evolutionary algorithms are commonly used to solve complex bilevel problems in practical scenarios, but they face significant resource consumption challenges due to the nested structure imposed by the implicit lower-level optimality condition. This challenge becomes even more pronounced as problem dimensions increase. Although recent methods have enhanced bilevel convergence through task-level knowledge sharing, further efficiency improvements are still hindered by redundant lower-level iterations that consume excessive resources while generating unpromising solutions. To overcome this challenge, this paper proposes an efficient dynamic resource allocation framework for evolutionary bilevel optimization, named DRC-BLEA. Compared to existing approaches, DRC-BLEA introduces a novel competitive quasi-parallel paradigm, in which multiple lower-level optimization tasks, derived from different upper-level individuals, compete for resources. A continuously updated selection probability is used to prioritize execution opportunities to promising tasks. Additionally, a cooperation mechanism is integrated within the competitive framework to further enhance efficiency and prevent premature convergence. Experimental results compared with chosen state-of-the-art algorithms demonstrate the effectiveness of the proposed method. Specifically, DRC-BLEA achieves competitive accuracy across diverse problem sets and real-world scenarios, while significantly reducing the number of function evaluations and overall running time.
Cross-Modality Attack Boosted by Gradient-Evolutionary Multiform Optimization
Sep 26, 2024



In recent years, despite significant advancements in adversarial attack research, the security challenges in cross-modal scenarios, such as the transferability of adversarial attacks between infrared, thermal, and RGB images, have been overlooked. These heterogeneous image modalities collected by different hardware devices are widely prevalent in practical applications, and the substantial differences between modalities pose significant challenges to attack transferability. In this work, we explore a novel cross-modal adversarial attack strategy, termed multiform attack. We propose a dual-layer optimization framework based on gradient-evolution, facilitating efficient perturbation transfer between modalities. In the first layer of optimization, the framework utilizes image gradients to learn universal perturbations within each modality and employs evolutionary algorithms to search for shared perturbations with transferability across different modalities through secondary optimization. Through extensive testing on multiple heterogeneous datasets, we demonstrate the superiority and robustness of Multiform Attack compared to existing techniques. This work not only enhances the transferability of cross-modal adversarial attacks but also provides a new perspective for understanding security vulnerabilities in cross-modal systems.
An Online Prediction Approach Based on Incremental Support Vector Machine for Dynamic Multiobjective Optimization
Feb 24, 2021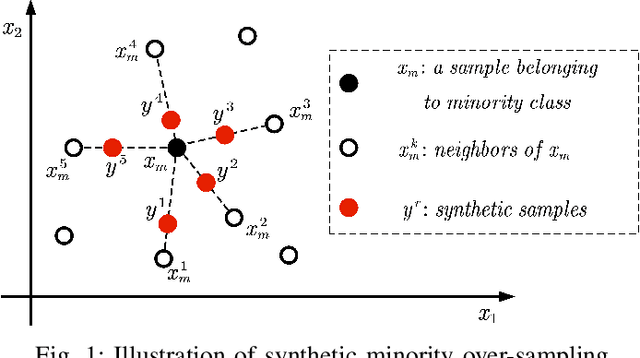

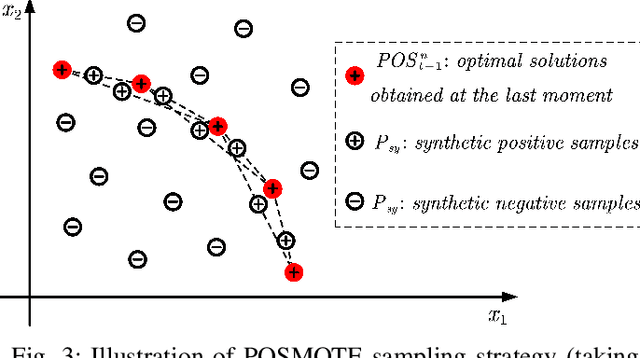
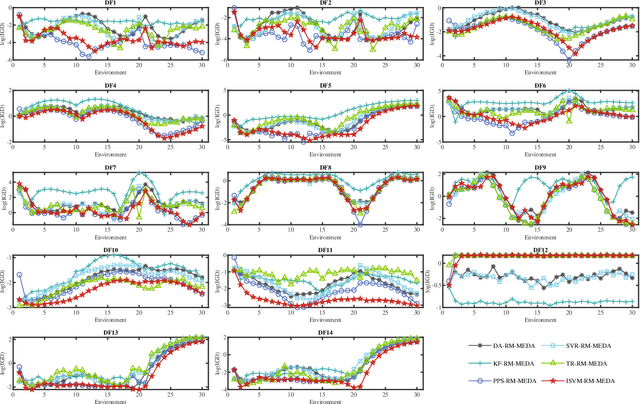
Real-world multiobjective optimization problems usually involve conflicting objectives that change over time, which requires the optimization algorithms to quickly track the Pareto optimal front (POF) when the environment changes. In recent years, evolutionary algorithms based on prediction models have been considered promising. However, most existing approaches only make predictions based on the linear correlation between a finite number of optimal solutions in two or three previous environments. These incomplete information extraction strategies may lead to low prediction accuracy in some instances. In this paper, a novel prediction algorithm based on incremental support vector machine (ISVM) is proposed, called ISVM-DMOEA. We treat the solving of dynamic multiobjective optimization problems (DMOPs) as an online learning process, using the continuously obtained optimal solution to update an incremental support vector machine without discarding the solution information at earlier time. ISVM is then used to filter random solutions and generate an initial population for the next moment. To overcome the obstacle of insufficient training samples, a synthetic minority oversampling strategy is implemented before the training of ISVM. The advantage of this approach is that the nonlinear correlation between solutions can be explored online by ISVM, and the information contained in all historical optimal solutions can be exploited to a greater extent. The experimental results and comparison with chosen state-of-the-art algorithms demonstrate that the proposed algorithm can effectively tackle dynamic multiobjective optimization problems.