 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Critical Perceptual Pre-trained Model for Complex Trajectory Recovery
Nov 05, 2023



The trajectory on the road traffic is commonly collected at a low sampling rate, and trajectory recovery aims to recover a complete and continuous trajectory from the sparse and discrete inputs. Recently, sequential language models have been innovatively adopted for trajectory recovery in a pre-trained manner: it learns road segment representation vectors, which will be used in the downstream tasks. However, existing methods are incapable of handling complex trajectories: when the trajectory crosses remote road segments or makes several turns, which we call critical nodes, the quality of learned representations deteriorates, and the recovered trajectories skip the critical nodes. This work is dedicated to offering a more robust trajectory recovery for complex trajectories. Firstly, we define the trajectory complexity based on the detour score and entropy score and construct the complexity-aware semantic graphs correspondingly. Then, we propose a Multi-view Graph and Complexity Aware Transformer (MGCAT) model to encode these semantics in trajectory pre-training from two aspects: 1) adaptively aggregate the multi-view graph features considering trajectory pattern, and 2) higher attention to critical nodes in a complex trajectory. Such that, our MGCAT is perceptual when handling the critical scenario of complex trajectories. Extensive experiments are conducted on large-scale datasets. The results prove that our method learns better representations for trajectory recovery, with 5.22% higher F1-score overall and 8.16% higher F1-score for complex trajectories particularly. The code is available at https://github.com/bonaldli/ComplexTraj.
Jointly Contrastive Representation Learning on Road Network and Trajectory
Sep 14, 2022


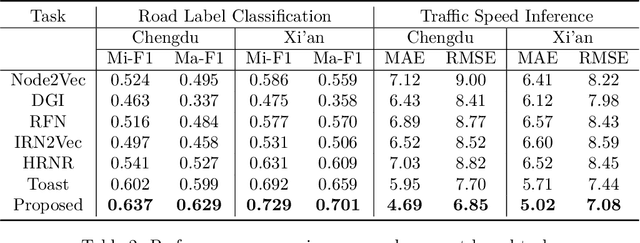
Road network and trajectory representation learning are essential for traffic systems since the learned representation can be directly used in various downstream tasks (e.g., traffic speed inference, and travel time estimation). However, most existing methods only contrast within the same scale, i.e., treating road network and trajectory separately, which ignores valuable inter-relations. In this paper, we aim to propose a unified framework that jointly learns the road network and trajectory representations end-to-end. We design domain-specific augmentations for road-road contrast and trajectory-trajectory contrast separately, i.e., road segment with its contextual neighbors and trajectory with its detour replaced and dropped alternatives, respectively. On top of that, we further introduce the road-trajectory cross-scale contrast to bridge the two scales by maximizing the total mutual information. Unlike the existing cross-scale contrastive learning methods on graphs that only contrast a graph and its belonging nodes, the contrast between road segment and trajectory is elaborately tailored via novel positive sampling and adaptive weighting strategies. We conduct prudent experiments based on two real-world datasets with four downstream tasks, demonstrating improved performance and effectiveness. The code is available at https://github.com/mzy94/JCLRNT.