 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOlbedo: An Albedo and Shading Aerial Dataset for Large-Scale Outdoor Environments
Feb 24, 2026Intrinsic image decomposition (IID) of outdoor scenes is crucial for relighting, editing, and understanding large-scale environments, but progress has been limited by the lack of real-world datasets with reliable albedo and shading supervision. We introduce Olbedo, a large-scale aerial dataset for outdoor albedo--shading decomposition in the wild. Olbedo contains 5,664 UAV images captured across four landscape types, multiple years, and diverse illumination conditions. Each view is accompanied by multi-view consistent albedo and shading maps, metric depth, surface normals, sun and sky shading components, camera poses, and, for recent flights, measured HDR sky domes. These annotations are derived from an inverse-rendering refinement pipeline over multi-view stereo reconstructions and calibrated sky illumination, together with per-pixel confidence masks. We demonstrate that Olbedo enables state-of-the-art diffusion-based IID models, originally trained on synthetic indoor data, to generalize to real outdoor imagery: fine-tuning on Olbedo significantly improves single-view outdoor albedo prediction on the MatrixCity benchmark. We further illustrate applications of Olbedo-trained models to multi-view consistent relighting of 3D assets, material editing, and scene change analysis for urban digital twins. We release the dataset, baseline models, and an evaluation protocol to support future research in outdoor intrinsic decomposition and illumination-aware aerial vision.
Uncertainty Quantification Framework for Aerial and UAV Photogrammetry through Error Propagation
Jul 17, 2025Uncertainty quantification of the photogrammetry process is essential for providing per-point accuracy credentials of the point clouds. Unlike airborne LiDAR, which typically delivers consistent accuracy across various scenes, the accuracy of photogrammetric point clouds is highly scene-dependent, since it relies on algorithm-generated measurements (i.e., stereo or multi-view stereo). Generally, errors of the photogrammetric point clouds propagate through a two-step process: Structure-from-Motion (SfM) with Bundle adjustment (BA), followed by Multi-view Stereo (MVS). While uncertainty estimation in the SfM stage has been well studied using the first-order statistics of the reprojection error function, that in the MVS stage remains largely unsolved and non-standardized, primarily due to its non-differentiable and multi-modal nature (i.e., from pixel values to geometry). In this paper, we present an uncertainty quantification framework closing this gap by associating an error covariance matrix per point accounting for this two-step photogrammetry process. Specifically, to estimate the uncertainty in the MVS stage, we propose a novel, self-calibrating method by taking reliable n-view points (n>=6) per-view to regress the disparity uncertainty using highly relevant cues (such as matching cost values) from the MVS stage. Compared to existing approaches, our method uses self-contained, reliable 3D points extracted directly from the MVS process, with the benefit of being self-supervised and naturally adhering to error propagation path of the photogrammetry process, thereby providing a robust and certifiable uncertainty quantification across diverse scenes. We evaluate the framework using a variety of publicly available airborne and UAV imagery datasets. Results demonstrate that our method outperforms existing approaches by achieving high bounding rates without overestimating uncertainty.
Enabling Neural Radiance Fields (NeRF) for Large-scale Aerial Images -- A Multi-tiling Approach and the Geometry Assessment of NeRF
Oct 17, 2023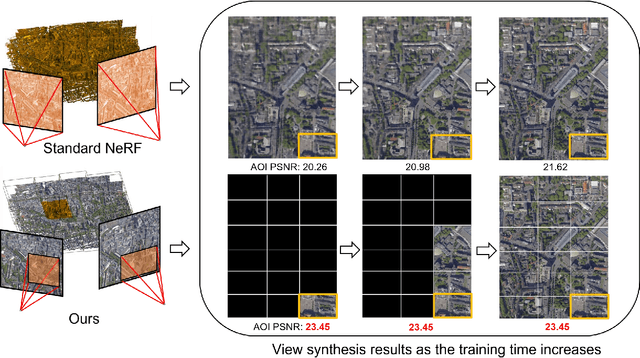
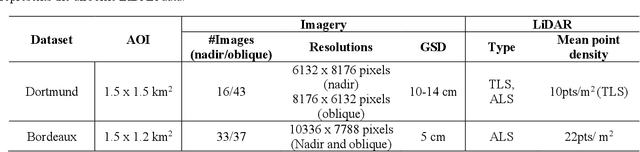

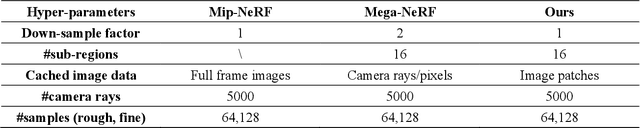
Neural Radiance Fields (NeRF) offer the potential to benefit 3D reconstruction tasks, including aerial photogrammetry. However, the scalability and accuracy of the inferred geometry are not well-documented for large-scale aerial assets,since such datasets usually result in very high memory consumption and slow convergence.. In this paper, we aim to scale the NeRF on large-scael aerial datasets and provide a thorough geometry assessment of NeRF. Specifically, we introduce a location-specific sampling technique as well as a multi-camera tiling (MCT) strategy to reduce memory consumption during image loading for RAM, representation training for GPU memory, and increase the convergence rate within tiles. MCT decomposes a large-frame image into multiple tiled images with different camera models, allowing these small-frame images to be fed into the training process as needed for specific locations without a loss of accuracy. We implement our method on a representative approach, Mip-NeRF, and compare its geometry performance with threephotgrammetric MVS pipelines on two typical aerial datasets against LiDAR reference data. Both qualitative and quantitative results suggest that the proposed NeRF approach produces better completeness and object details than traditional approaches, although as of now, it still falls short in terms of accuracy.
a critical analysis of internal reliability for uncertainty quantification of dense image matching in multi-view stereo
Sep 17, 2023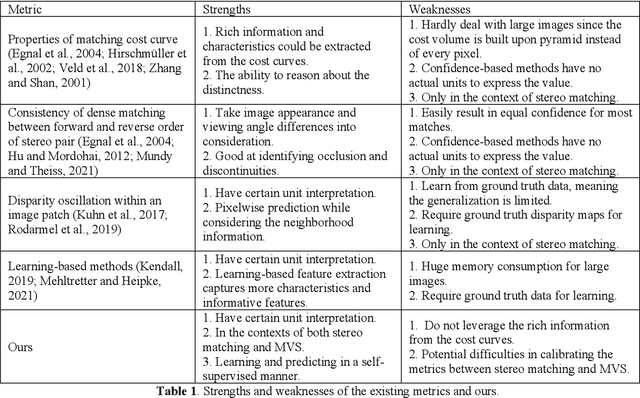
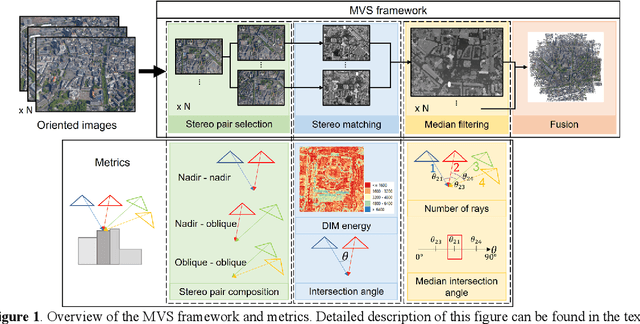
Nowadays, photogrammetrically derived point clouds are widely used in many civilian applications due to their low cost and flexibility in acquisition. Typically, photogrammetric point clouds are assessed through reference data such as LiDAR point clouds. However, when reference data are not available, the assessment of photogrammetric point clouds may be challenging. Since these point clouds are algorithmically derived, their accuracies and precisions are highly varying with the camera networks, scene complexity, and dense image matching (DIM) algorithms, and there is no standard error metric to determine per-point errors. The theory of internal reliability of camera networks has been well studied through first-order error estimation of Bundle Adjustment (BA), which is used to understand the errors of 3D points assuming known measurement errors. However, the measurement errors of the DIM algorithms are intricate to an extent that every single point may have its error function determined by factors such as pixel intensity, texture entropy, and surface smoothness. Despite the complexity, there exist a few common metrics that may aid the process of estimating the posterior reliability of the derived points, especially in a multi-view stereo (MVS) setup when redundancies are present. In this paper, by using an aerial oblique photogrammetric block with LiDAR reference data, we analyze several internal matching metrics within a common MVS framework, including statistics in ray convergence, intersection angles, DIM energy, etc.
Constrained Bundle Adjustment for Structure From Motion Using Uncalibrated Multi-Camera Systems
Apr 08, 2022



Structure from motion using uncalibrated multi-camera systems is a challenging task. This paper proposes a bundle adjustment solution that implements a baseline constraint respecting that these cameras are static to each other. We assume these cameras are mounted on a mobile platform, uncalibrated, and coarsely synchronized. To this end, we propose the baseline constraint that is formulated for the scenario in which the cameras have overlapping views. The constraint is incorporated in the bundle adjustment solution to keep the relative motion of different cameras static. Experiments were conducted using video frames of two collocated GoPro cameras mounted on a vehicle with no system calibration. These two cameras were placed capturing overlapping contents. We performed our bundle adjustment using the proposed constraint and then produced 3D dense point clouds. Evaluations were performed by comparing these dense point clouds against LiDAR reference data. We showed that, as compared to traditional bundle adjustment, our proposed method achieved an improvement of 29.38%.
A volumetric change detection framework using UAV oblique photogrammetry - A case study of ultra-high-resolution monitoring of progressive building collapse
Aug 05, 2021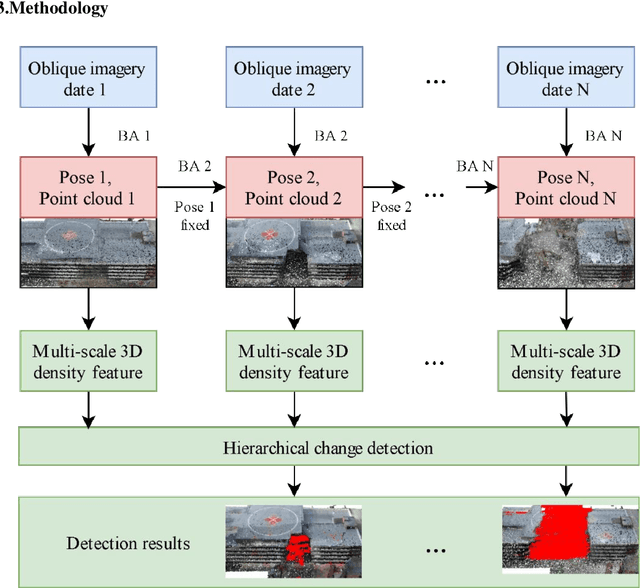

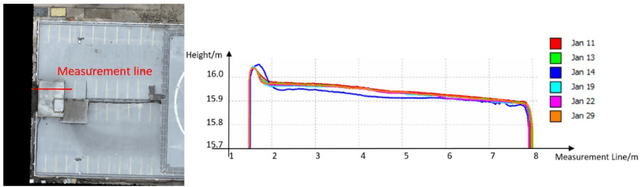
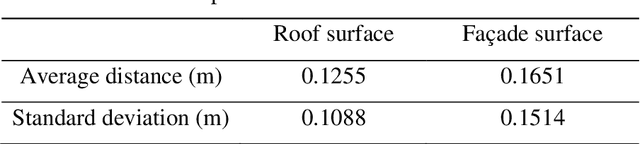
In this paper, we present a case study that performs an unmanned aerial vehicle (UAV) based fine-scale 3D change detection and monitoring of progressive collapse performance of a building during a demolition event. Multi-temporal oblique photogrammetry images are collected with 3D point clouds generated at different stages of the demolition. The geometric accuracy of the generated point clouds has been evaluated against both airborne and terrestrial LiDAR point clouds, achieving an average distance of 12 cm and 16 cm for roof and facade respectively. We propose a hierarchical volumetric change detection framework that unifies multi-temporal UAV images for pose estimation (free of ground control points), reconstruction, and a coarse-to-fine 3D density change analysis. This work has provided a solution capable of addressing change detection on full 3D time-series datasets where dramatic scene content changes are presented progressively. Our change detection results on the building demolition event have been evaluated against the manually marked ground-truth changes and have achieved an F-1 score varying from 0.78 to 0.92, with consistently high precision (0.92 - 0.99). Volumetric changes through the demolition progress are derived from change detection and have shown to favorably reflect the qualitative and quantitative building demolition progression.