 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProcedimiento de auditoría de ciberseguridad para sistemas autónomos: metodología, amenazas y mitigaciones
Nov 07, 2025The deployment of autonomous systems has experienced remarkable growth in recent years, driven by their integration into sectors such as industry, medicine, logistics, and domestic environments. This expansion is accompanied by a series of security issues that entail significant risks due to the critical nature of autonomous systems, especially those operating in human-interaction environments. Furthermore, technological advancement and the high operational and architectural complexity of autonomous systems have resulted in an increased attack surface. This article presents a specific security auditing procedure for autonomous systems, based on a layer-structured methodology, a threat taxonomy adapted to the robotic context, and a set of concrete mitigation measures. The validity of the proposed approach is demonstrated through four practical case studies applied to representative robotic platforms: the Vision 60 military quadruped from Ghost Robotics, the A1 robot from Unitree Robotics, the UR3 collaborative arm from Universal Robots, and the Pepper social robot from Aldebaran Robotics.
Integrating Quantized LLMs into Robotics Systems as Edge AI to Leverage their Natural Language Processing Capabilities
Jun 11, 2025Large Language Models (LLMs) have experienced great advancements in the last year resulting in an increase of these models in several fields to face natural language tasks. The integration of these models in robotics can also help to improve several aspects such as human-robot interaction, navigation, planning and decision-making. Therefore, this paper introduces llama\_ros, a tool designed to integrate quantized Large Language Models (LLMs) into robotic systems using ROS 2. Leveraging llama.cpp, a highly optimized runtime engine, llama\_ros enables the efficient execution of quantized LLMs as edge artificial intelligence (AI) in robotics systems with resource-constrained environments, addressing the challenges of computational efficiency and memory limitations. By deploying quantized LLMs, llama\_ros empowers robots to leverage the natural language understanding and generation for enhanced decision-making and interaction which can be paired with prompt engineering, knowledge graphs, ontologies or other tools to improve the capabilities of autonomous robots. Additionally, this paper provides insights into some use cases of using llama\_ros for planning and explainability in robotics.
Generating Explanations for Autonomous Robots: a Systematic Review
Dec 24, 2024Building trust between humans and robots has long interested the robotics community. Various studies have aimed to clarify the factors that influence the development of user trust. In Human-Robot Interaction (HRI) environments, a critical aspect of trust development is the robot's ability to make its behavior understandable. The concept of an eXplainable Autonomous Robot (XAR) addresses this requirement. However, giving a robot self-explanatory abilities is a complex task. Robot behavior includes multiple skills and diverse subsystems. This complexity led to research into a wide range of methods for generating explanations about robot behavior. This paper presents a systematic literature review that analyzes existing strategies for generating explanations in robots and studies the current XAR trends. Results indicate promising advancements in explainability systems. However, these systems are still unable to fully cover the complex behavior of autonomous robots. Furthermore, we also identify a lack of consensus on the theoretical concept of explainability, and the need for a robust methodology to assess explainability methods and tools has been identified.
Enhancing Robot Explanation Capabilities through Vision-Language Models: a Preliminary Study by Interpreting Visual Inputs for Improved Human-Robot Interaction
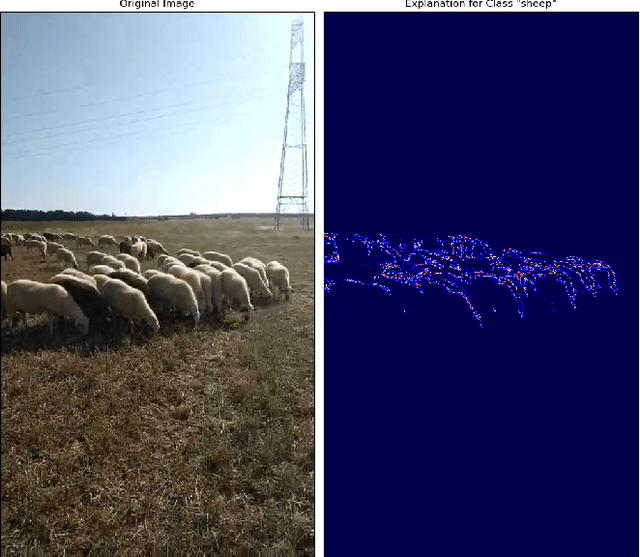
Apr 15, 2024This paper presents an improved system based on our prior work, designed to create explanations for autonomous robot actions during Human-Robot Interaction (HRI). Previously, we developed a system that used Large Language Models (LLMs) to interpret logs and produce natural language explanations. In this study, we expand our approach by incorporating Vision-Language Models (VLMs), enabling the system to analyze textual logs with the added context of visual input. This method allows for generating explanations that combine data from the robot's logs and the images it captures. We tested this enhanced system on a basic navigation task where the robot needs to avoid a human obstacle. The findings from this preliminary study indicate that adding visual interpretation improves our system's explanations by precisely identifying obstacles and increasing the accuracy of the explanations provided.
ROXIE: Defining a Robotic eXplanation and Interpretability Engine
Mar 25, 2024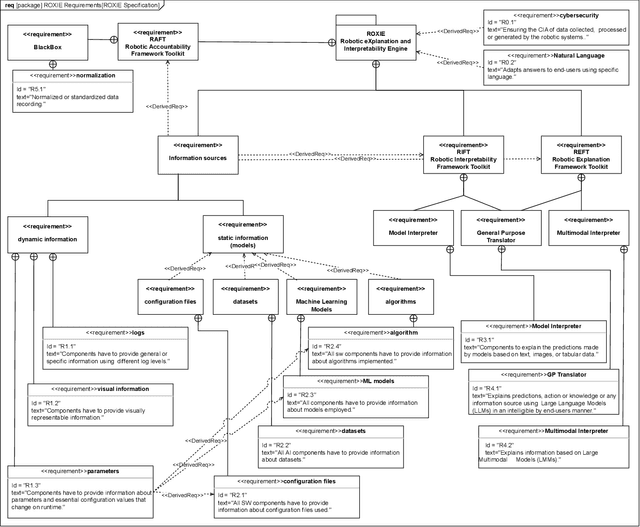
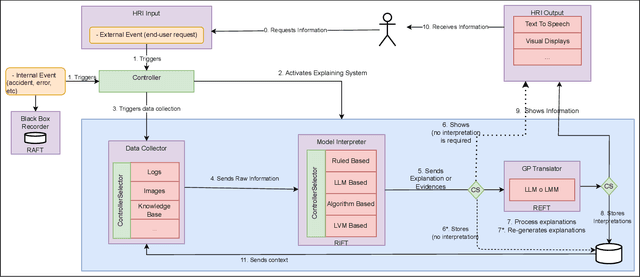
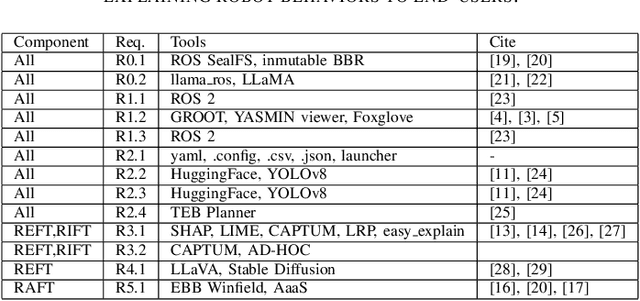
In an era where autonomous robots increasingly inhabit public spaces, the imperative for transparency and interpretability in their decision-making processes becomes paramount. This paper presents the overview of a Robotic eXplanation and Interpretability Engine (ROXIE), which addresses this critical need, aiming to demystify the opaque nature of complex robotic behaviors. This paper elucidates the key features and requirements needed for providing information and explanations about robot decision-making processes. It also overviews the suite of software components and libraries available for deployment with ROS 2, empowering users to provide comprehensive explanations and interpretations of robot processes and behaviors, thereby fostering trust and collaboration in human-robot interactions.
Explaining Autonomy: Enhancing Human-Robot Interaction through Explanation Generation with Large Language Models
Feb 06, 2024This paper introduces a system designed to generate explanations for the actions performed by an autonomous robot in Human-Robot Interaction (HRI). Explainability in robotics, encapsulated within the concept of an eXplainable Autonomous Robot (XAR), is a growing research area. The work described in this paper aims to take advantage of the capabilities of Large Language Models (LLMs) in performing natural language processing tasks. This study focuses on the possibility of generating explanations using such models in combination with a Retrieval Augmented Generation (RAG) method to interpret data gathered from the logs of autonomous systems. In addition, this work also presents a formalization of the proposed explanation system. It has been evaluated through a navigation test from the European Robotics League (ERL), a Europe-wide social robotics competition. Regarding the obtained results, a validation questionnaire has been conducted to measure the quality of the explanations from the perspective of technical users. The results obtained during the experiment highlight the potential utility of LLMs in achieving explanatory capabilities in robots.
Using Large Language Models for Interpreting Autonomous Robots Behaviors
Apr 28, 2023The deployment of autonomous robots in various domains has raised significant concerns about their trustworthiness and accountability. This study explores the potential of Large Language Models (LLMs) in analyzing ROS 2 logs generated by autonomous robots and proposes a framework for log analysis that categorizes log files into different aspects. The study evaluates the performance of three different language models in answering questions related to StartUp, Warning, and PDDL logs. The results suggest that GPT 4, a transformer-based model, outperforms other models, however, their verbosity is not enough to answer why or how questions for all kinds of actors involved in the interaction.