 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProcedimiento de auditoría de ciberseguridad para sistemas autónomos: metodología, amenazas y mitigaciones
Nov 07, 2025The deployment of autonomous systems has experienced remarkable growth in recent years, driven by their integration into sectors such as industry, medicine, logistics, and domestic environments. This expansion is accompanied by a series of security issues that entail significant risks due to the critical nature of autonomous systems, especially those operating in human-interaction environments. Furthermore, technological advancement and the high operational and architectural complexity of autonomous systems have resulted in an increased attack surface. This article presents a specific security auditing procedure for autonomous systems, based on a layer-structured methodology, a threat taxonomy adapted to the robotic context, and a set of concrete mitigation measures. The validity of the proposed approach is demonstrated through four practical case studies applied to representative robotic platforms: the Vision 60 military quadruped from Ghost Robotics, the A1 robot from Unitree Robotics, the UR3 collaborative arm from Universal Robots, and the Pepper social robot from Aldebaran Robotics.
Enhancing Robot Explanation Capabilities through Vision-Language Models: a Preliminary Study by Interpreting Visual Inputs for Improved Human-Robot Interaction
Apr 15, 2024This paper presents an improved system based on our prior work, designed to create explanations for autonomous robot actions during Human-Robot Interaction (HRI). Previously, we developed a system that used Large Language Models (LLMs) to interpret logs and produce natural language explanations. In this study, we expand our approach by incorporating Vision-Language Models (VLMs), enabling the system to analyze textual logs with the added context of visual input. This method allows for generating explanations that combine data from the robot's logs and the images it captures. We tested this enhanced system on a basic navigation task where the robot needs to avoid a human obstacle. The findings from this preliminary study indicate that adding visual interpretation improves our system's explanations by precisely identifying obstacles and increasing the accuracy of the explanations provided.
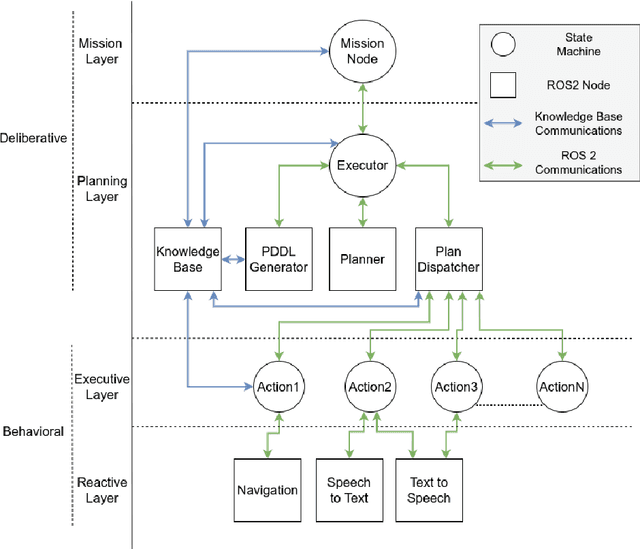
Enhancing Trust in Autonomous Agents: An Architecture for Accountability and Explainability through Blockchain and Large Language Models
Mar 14, 2024The deployment of autonomous agents in environments involving human interaction has increasingly raised security concerns. Consequently, understanding the circumstances behind an event becomes critical, requiring the development of capabilities to justify their behaviors to non-expert users. Such explanations are essential in enhancing trustworthiness and safety, acting as a preventive measure against failures, errors, and misunderstandings. Additionally, they contribute to improving communication, bridging the gap between the agent and the user, thereby improving the effectiveness of their interactions. This work presents an accountability and explainability architecture implemented for ROS-based mobile robots. The proposed solution consists of two main components. Firstly, a black box-like element to provide accountability, featuring anti-tampering properties achieved through blockchain technology. Secondly, a component in charge of generating natural language explanations by harnessing the capabilities of Large Language Models (LLMs) over the data contained within the previously mentioned black box. The study evaluates the performance of our solution in three different scenarios, each involving autonomous agent navigation functionalities. This evaluation includes a thorough examination of accountability and explainability metrics, demonstrating the effectiveness of our approach in using accountable data from robot actions to obtain coherent, accurate and understandable explanations, even when facing challenges inherent in the use of autonomous agents in real-world scenarios.
YASMIN: Yet Another State MachINe library for ROS 2
May 26, 2022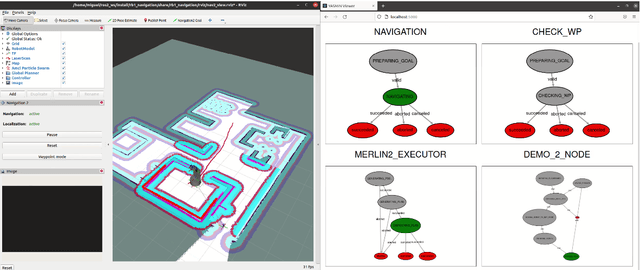
State machines are a common mechanism for defining behaviors in robots, defining them based on identifiable stages. There are several libraries available for easing the implementation of state machines in ROS 1, as SMACH or SMACC, but there are fewer alternatives for ROS 2. YASMIN is yet another library specifically designed for ROS 2 for easing the design of robotic behaviors using state machines. It is available in C++ and Python, provides some default states to speed up the development, and a web viewer for monitoring the execution of the system and helping in the debugging.