 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Trust in Autonomous Agents: An Architecture for Accountability and Explainability through Blockchain and Large Language Models
Mar 14, 2024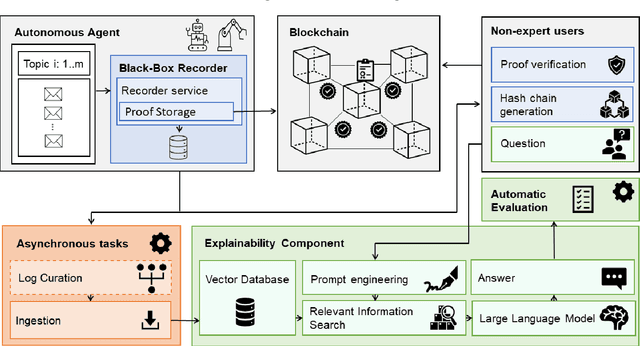



The deployment of autonomous agents in environments involving human interaction has increasingly raised security concerns. Consequently, understanding the circumstances behind an event becomes critical, requiring the development of capabilities to justify their behaviors to non-expert users. Such explanations are essential in enhancing trustworthiness and safety, acting as a preventive measure against failures, errors, and misunderstandings. Additionally, they contribute to improving communication, bridging the gap between the agent and the user, thereby improving the effectiveness of their interactions. This work presents an accountability and explainability architecture implemented for ROS-based mobile robots. The proposed solution consists of two main components. Firstly, a black box-like element to provide accountability, featuring anti-tampering properties achieved through blockchain technology. Secondly, a component in charge of generating natural language explanations by harnessing the capabilities of Large Language Models (LLMs) over the data contained within the previously mentioned black box. The study evaluates the performance of our solution in three different scenarios, each involving autonomous agent navigation functionalities. This evaluation includes a thorough examination of accountability and explainability metrics, demonstrating the effectiveness of our approach in using accountable data from robot actions to obtain coherent, accurate and understandable explanations, even when facing challenges inherent in the use of autonomous agents in real-world scenarios.
SAILOR: Perceptual Anchoring For Robotic Cognitive Architectures
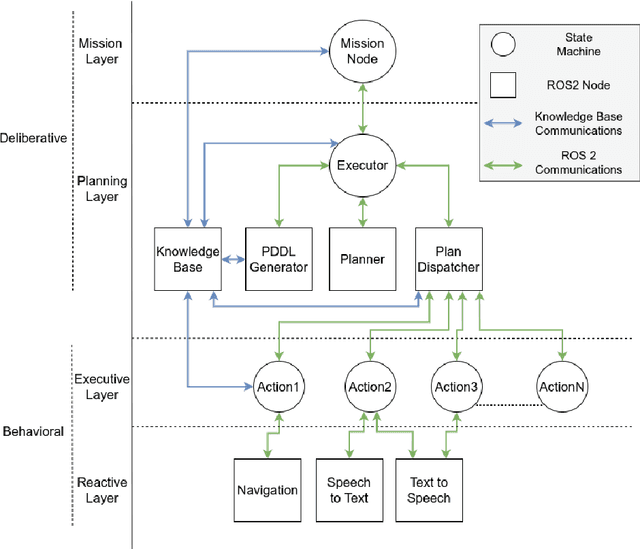
Mar 14, 2023Symbolic anchoring is a crucial problem in the field of robotics, as it enables robots to obtain symbolic knowledge from the perceptual information acquired through their sensors. In cognitive-based robots, this process of processing sub-symbolic data from real-world sensors to obtain symbolic knowledge is still an open problem. To address this issue, this paper presents SAILOR, a framework for providing symbolic anchoring in ROS 2 ecosystem. SAILOR aims to maintain the link between symbolic data and perceptual data in real robots over time. It provides a semantic world modeling approach using two deep learning-based sub-symbolic robotic skills: object recognition and matching function. The object recognition skill allows the robot to recognize and identify objects in its environment, while the matching function enables the robot to decide if new perceptual data corresponds to existing symbolic data. This paper provides a description of the framework, the pipeline and development as well as its integration in MERLIN2, a hybrid cognitive architecture fully functional in robots running ROS 2.
YASMIN: Yet Another State MachINe library for ROS 2
May 26, 2022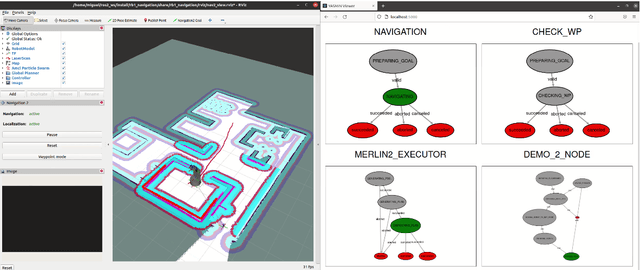
State machines are a common mechanism for defining behaviors in robots, defining them based on identifiable stages. There are several libraries available for easing the implementation of state machines in ROS 1, as SMACH or SMACC, but there are fewer alternatives for ROS 2. YASMIN is yet another library specifically designed for ROS 2 for easing the design of robotic behaviors using state machines. It is available in C++ and Python, provides some default states to speed up the development, and a web viewer for monitoring the execution of the system and helping in the debugging.