 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen Source Robot Localization for Non-Planar Environments
Sep 22, 2023



The operational environments in which a mobile robot executes its missions often exhibit non-flat terrain characteristics, encompassing outdoor and indoor settings featuring ramps and slopes. In such scenarios, the conventional methodologies employed for localization encounter novel challenges and limitations. This study delineates a localization framework incorporating ground elevation and inclination considerations, deviating from traditional 2D localization paradigms that may falter in such contexts. In our proposed approach, the map encompasses elevation and spatial occupancy information, employing Gridmaps and Octomaps. At the same time, the perception model is designed to accommodate the robot's inclined orientation and the potential presence of ground as an obstacle, besides usual structural and dynamic obstacles. We have developed and rigorously validated our approach within Nav2, and esteemed open-source framework renowned for robot navigation. Our findings demonstrate that our methodology represents a viable and effective alternative for mobile robots operating in challenging outdoor environments or intrincate terrains.
YASMIN: Yet Another State MachINe library for ROS 2
May 26, 2022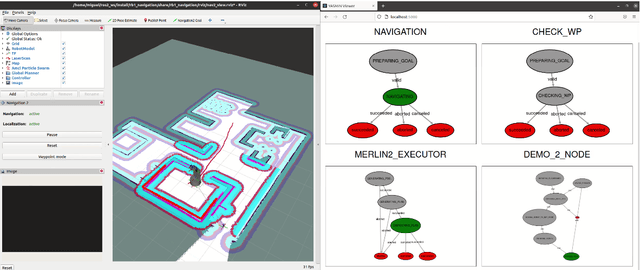
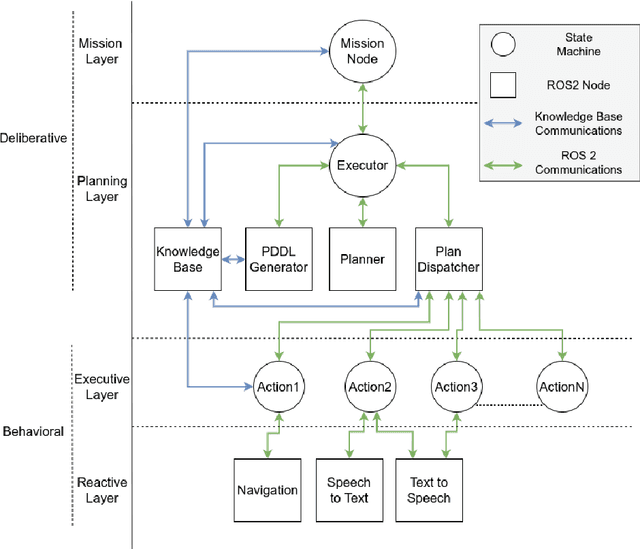
State machines are a common mechanism for defining behaviors in robots, defining them based on identifiable stages. There are several libraries available for easing the implementation of state machines in ROS 1, as SMACH or SMACC, but there are fewer alternatives for ROS 2. YASMIN is yet another library specifically designed for ROS 2 for easing the design of robotic behaviors using state machines. It is available in C++ and Python, provides some default states to speed up the development, and a web viewer for monitoring the execution of the system and helping in the debugging.