 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProcedimiento de auditoría de ciberseguridad para sistemas autónomos: metodología, amenazas y mitigaciones
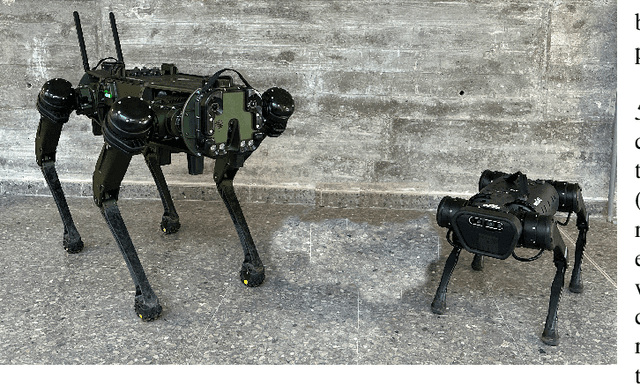
Nov 07, 2025The deployment of autonomous systems has experienced remarkable growth in recent years, driven by their integration into sectors such as industry, medicine, logistics, and domestic environments. This expansion is accompanied by a series of security issues that entail significant risks due to the critical nature of autonomous systems, especially those operating in human-interaction environments. Furthermore, technological advancement and the high operational and architectural complexity of autonomous systems have resulted in an increased attack surface. This article presents a specific security auditing procedure for autonomous systems, based on a layer-structured methodology, a threat taxonomy adapted to the robotic context, and a set of concrete mitigation measures. The validity of the proposed approach is demonstrated through four practical case studies applied to representative robotic platforms: the Vision 60 military quadruped from Ghost Robotics, the A1 robot from Unitree Robotics, the UR3 collaborative arm from Universal Robots, and the Pepper social robot from Aldebaran Robotics.
VAULT: A Mobile Mapping System for ROS 2-based Autonomous Robots
Jun 11, 2025
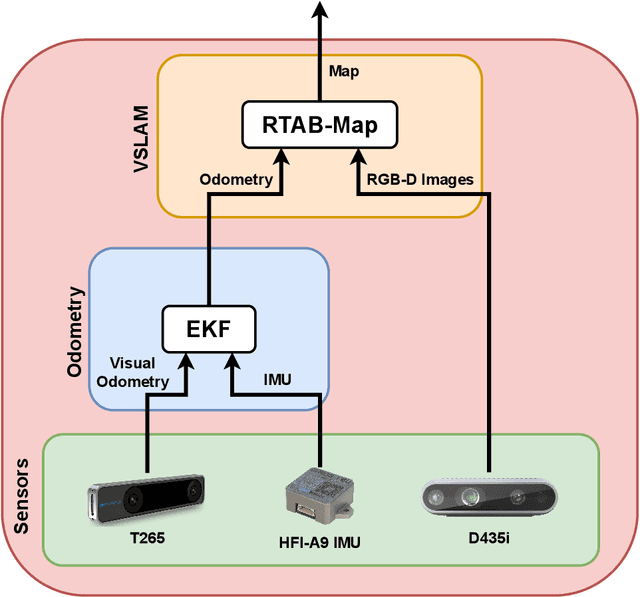
Localization plays a crucial role in the navigation capabilities of autonomous robots, and while indoor environments can rely on wheel odometry and 2D LiDAR-based mapping, outdoor settings such as agriculture and forestry, present unique challenges that necessitate real-time localization and consistent mapping. Addressing this need, this paper introduces the VAULT prototype, a ROS 2-based mobile mapping system (MMS) that combines various sensors to enable robust outdoor and indoor localization. The proposed solution harnesses the power of Global Navigation Satellite System (GNSS) data, visual-inertial odometry (VIO), inertial measurement unit (IMU) data, and the Extended Kalman Filter (EKF) to generate reliable 3D odometry. To further enhance the localization accuracy, Visual SLAM (VSLAM) is employed, resulting in the creation of a comprehensive 3D point cloud map. By leveraging these sensor technologies and advanced algorithms, the prototype offers a comprehensive solution for outdoor localization in autonomous mobile robots, enabling them to navigate and map their surroundings with confidence and precision.
Generating Explanations for Autonomous Robots: a Systematic Review
Dec 24, 2024Building trust between humans and robots has long interested the robotics community. Various studies have aimed to clarify the factors that influence the development of user trust. In Human-Robot Interaction (HRI) environments, a critical aspect of trust development is the robot's ability to make its behavior understandable. The concept of an eXplainable Autonomous Robot (XAR) addresses this requirement. However, giving a robot self-explanatory abilities is a complex task. Robot behavior includes multiple skills and diverse subsystems. This complexity led to research into a wide range of methods for generating explanations about robot behavior. This paper presents a systematic literature review that analyzes existing strategies for generating explanations in robots and studies the current XAR trends. Results indicate promising advancements in explainability systems. However, these systems are still unable to fully cover the complex behavior of autonomous robots. Furthermore, we also identify a lack of consensus on the theoretical concept of explainability, and the need for a robust methodology to assess explainability methods and tools has been identified.
Lessons Learned in Quadruped Deployment in Livestock Farming
Apr 24, 2024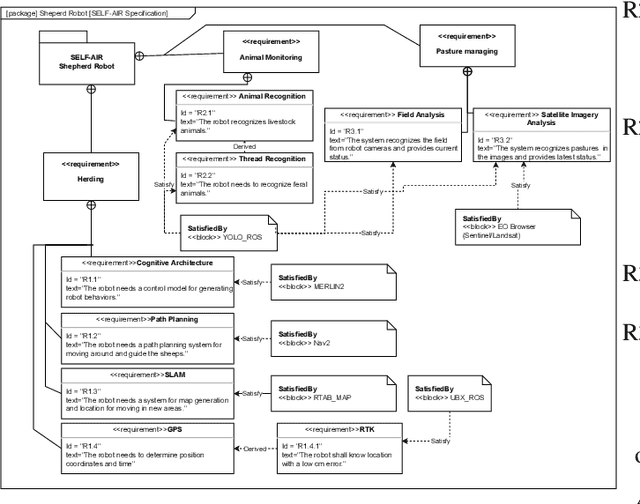

The livestock industry faces several challenges, including labor-intensive management, the threat of predators and environmental sustainability concerns. Therefore, this paper explores the integration of quadruped robots in extensive livestock farming as a novel application of field robotics. The SELF-AIR project, an acronym for Supporting Extensive Livestock Farming with the use of Autonomous Intelligent Robots, exemplifies this innovative approach. Through advanced sensors, artificial intelligence, and autonomous navigation systems, these robots exhibit remarkable capabilities in navigating diverse terrains, monitoring large herds, and aiding in various farming tasks. This work provides insight into the SELF-AIR project, presenting the lessons learned.
Enhancing Robot Explanation Capabilities through Vision-Language Models: a Preliminary Study by Interpreting Visual Inputs for Improved Human-Robot Interaction
Apr 15, 2024This paper presents an improved system based on our prior work, designed to create explanations for autonomous robot actions during Human-Robot Interaction (HRI). Previously, we developed a system that used Large Language Models (LLMs) to interpret logs and produce natural language explanations. In this study, we expand our approach by incorporating Vision-Language Models (VLMs), enabling the system to analyze textual logs with the added context of visual input. This method allows for generating explanations that combine data from the robot's logs and the images it captures. We tested this enhanced system on a basic navigation task where the robot needs to avoid a human obstacle. The findings from this preliminary study indicate that adding visual interpretation improves our system's explanations by precisely identifying obstacles and increasing the accuracy of the explanations provided.
Explaining Autonomy: Enhancing Human-Robot Interaction through Explanation Generation with Large Language Models
Feb 06, 2024This paper introduces a system designed to generate explanations for the actions performed by an autonomous robot in Human-Robot Interaction (HRI). Explainability in robotics, encapsulated within the concept of an eXplainable Autonomous Robot (XAR), is a growing research area. The work described in this paper aims to take advantage of the capabilities of Large Language Models (LLMs) in performing natural language processing tasks. This study focuses on the possibility of generating explanations using such models in combination with a Retrieval Augmented Generation (RAG) method to interpret data gathered from the logs of autonomous systems. In addition, this work also presents a formalization of the proposed explanation system. It has been evaluated through a navigation test from the European Robotics League (ERL), a Europe-wide social robotics competition. Regarding the obtained results, a validation questionnaire has been conducted to measure the quality of the explanations from the perspective of technical users. The results obtained during the experiment highlight the potential utility of LLMs in achieving explanatory capabilities in robots.
Integration of Large Language Models within Cognitive Architectures for Autonomous Robots
Sep 26, 2023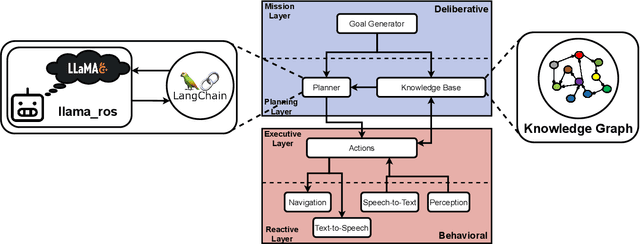
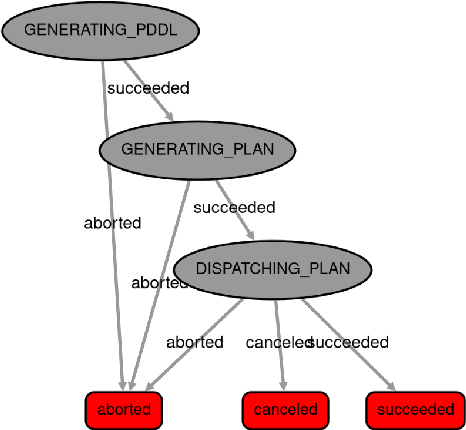
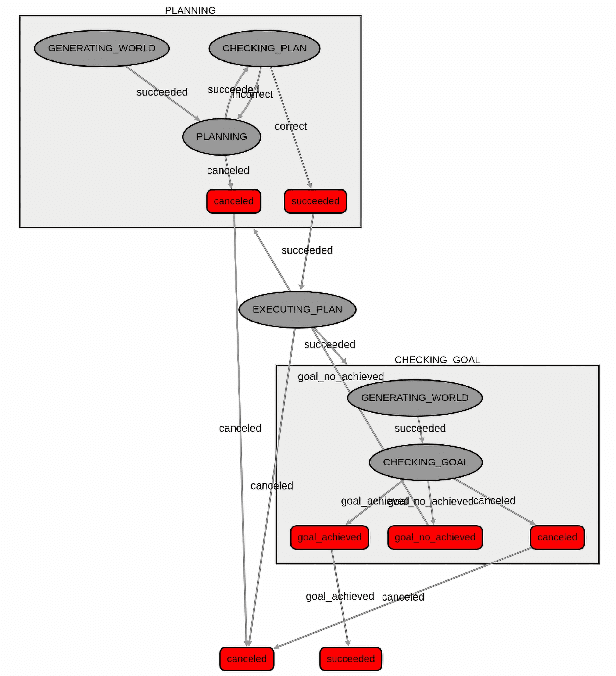
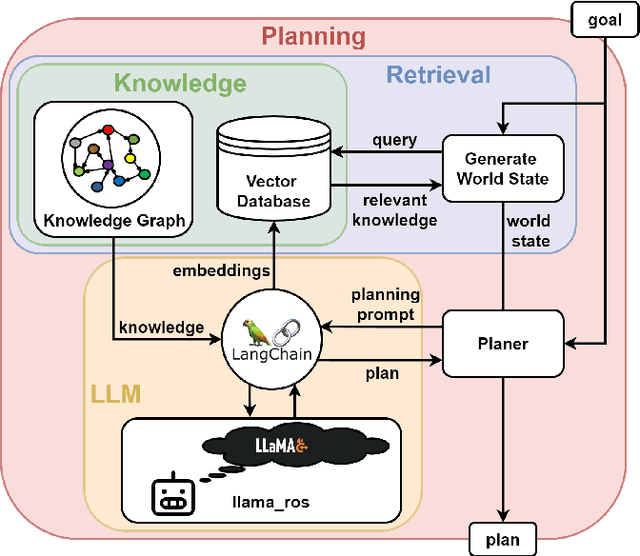
The usage of Large Language Models (LLMs) has increased recently, not only due to the significant improvements in their accuracy but also because of the use of the quantization that allows running these models without intense hardware requirements. As a result, the LLMs have proliferated. It implies the creation of a great variety of LLMs with different capabilities. This way, this paper proposes the integration of LLMs in cognitive architectures for autonomous robots. Specifically, we present the design, development and deployment of the llama\_ros tool that allows the easy use and integration of LLMs in ROS 2-based environments, afterward integrated with the state-of-the-art cognitive architecture MERLIN2 for updating a PDDL-based planner system. This proposal is evaluated quantitatively and qualitatively, measuring the impact of incorporating the LLMs in the cognitive architecture.