 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-cultural analysis of pedestrian group behaviour influence on crossing decisions in interactions with autonomous vehicles
Aug 06, 2024Understanding cultural backgrounds is crucial for the seamless integration of autonomous driving into daily life as it ensures that systems are attuned to diverse societal norms and behaviours, enhancing acceptance and safety in varied cultural contexts. In this work, we investigate the impact of co-located pedestrians on crossing behaviour, considering cultural and situational factors. To accomplish this, a full-scale virtual reality (VR) environment was created in the CARLA simulator, enabling the identical experiment to be replicated in both Spain and Australia. Participants (N=30) attempted to cross the road at an urban crosswalk alongside other pedestrians exhibiting conservative to more daring behaviours, while an autonomous vehicle (AV) approached with different driving styles. For the analysis of interactions, we utilized questionnaires and direct measures of the moment when participants entered the lane. Our findings indicate that pedestrians tend to cross the same traffic gap together, even though reckless behaviour by the group reduces confidence and makes the situation perceived as more complex. Australian participants were willing to take fewer risks than Spanish participants, adopting more cautious behaviour when it was uncertain whether the AV would yield.
Use case cards: a use case reporting framework inspired by the European AI Act
Jun 23, 2023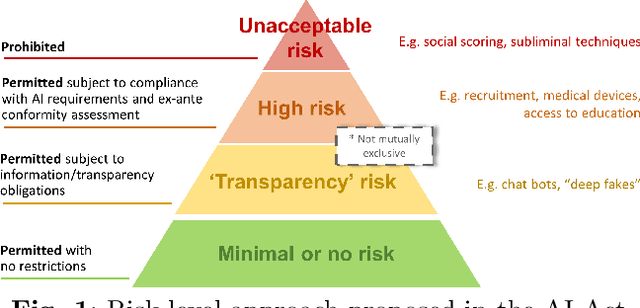
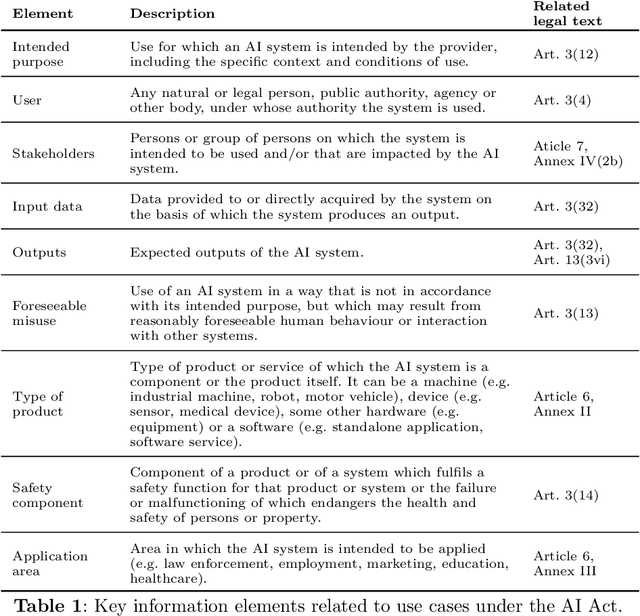

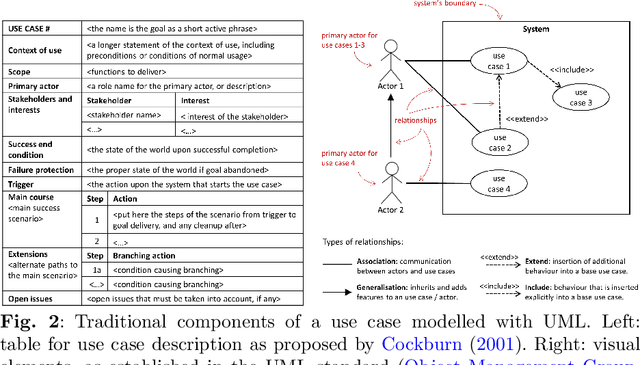
Despite recent efforts by the Artificial Intelligence (AI) community to move towards standardised procedures for documenting models, methods, systems or datasets, there is currently no methodology focused on use cases aligned with the risk-based approach of the European AI Act (AI Act). In this paper, we propose a new framework for the documentation of use cases, that we call "use case cards", based on the use case modelling included in the Unified Markup Language (UML) standard. Unlike other documentation methodologies, we focus on the intended purpose and operational use of an AI system. It consists of two main parts. Firstly, a UML-based template, tailored to allow implicitly assessing the risk level of the AI system and defining relevant requirements. Secondly, a supporting UML diagram designed to provide information about the system-user interactions and relationships. The proposed framework is the result of a co-design process involving a relevant team of EU policy experts and scientists. We have validated our proposal with 11 experts with different backgrounds and a reasonable knowledge of the AI Act as a prerequisite. We provide the 5 "use case cards" used in the co-design and validation process. "Use case cards" allows framing and contextualising use cases in an effective way, and we hope this methodology can be a useful tool for policy makers and providers for documenting use cases, assessing the risk level, adapting the different requirements and building a catalogue of existing usages of AI.
Video action recognition for lane-change classification and prediction of surrounding vehicles
Jan 13, 2021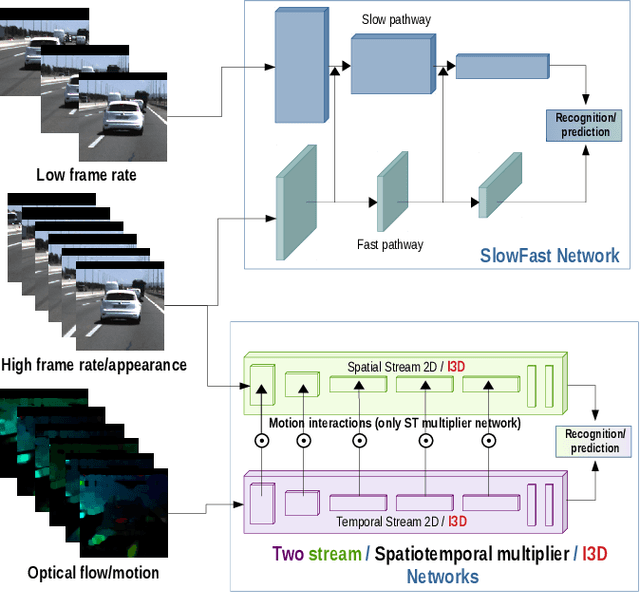
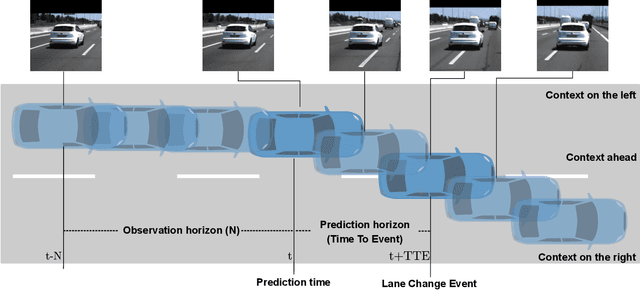
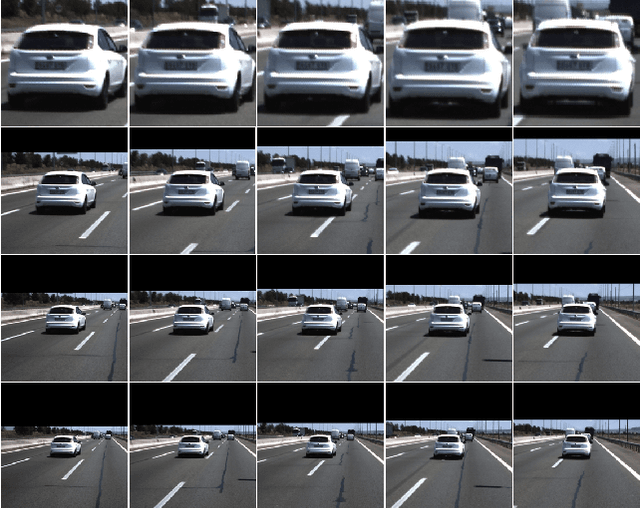
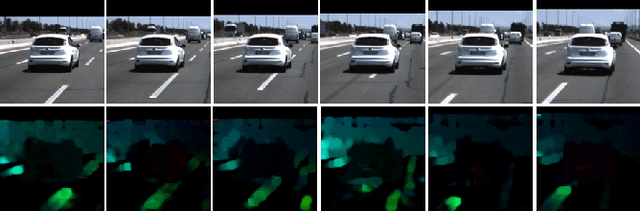
In highway scenarios, an alert human driver will typically anticipate early cut-in/cut-out maneuvers of surrounding vehicles using visual cues mainly. Autonomous vehicles must anticipate these situations at an early stage too, to increase their safety and efficiency. In this work, lane-change recognition and prediction tasks are posed as video action recognition problems. Up to four different two-stream-based approaches, that have been successfully applied to address human action recognition, are adapted here by stacking visual cues from forward-looking video cameras to recognize and anticipate lane-changes of target vehicles. We study the influence of context and observation horizons on performance, and different prediction horizons are analyzed. The different models are trained and evaluated using the PREVENTION dataset. The obtained results clearly demonstrate the potential of these methodologies to serve as robust predictors of future lane-changes of surrounding vehicles proving an accuracy higher than 90% in time horizons of between 1-2 seconds.
Two-Stream Networks for Lane-Change Prediction of Surrounding Vehicles
Aug 25, 2020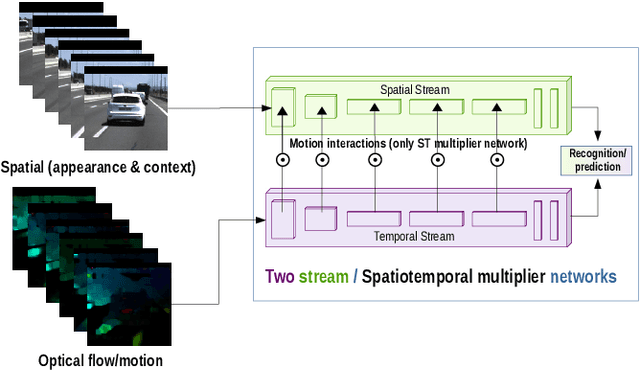

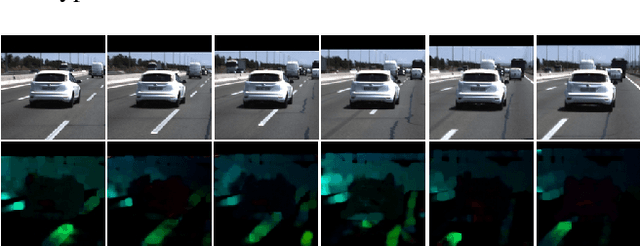

In highway scenarios, an alert human driver will typically anticipate early cut-in and cut-out maneuvers of surrounding vehicles using only visual cues. An automated system must anticipate these situations at an early stage too, to increase the safety and the efficiency of its performance. To deal with lane-change recognition and prediction of surrounding vehicles, we pose the problem as an action recognition/prediction problem by stacking visual cues from video cameras. Two video action recognition approaches are analyzed: two-stream convolutional networks and spatiotemporal multiplier networks. Different sizes of the regions around the vehicles are analyzed, evaluating the importance of the interaction between vehicles and the context information in the performance. In addition, different prediction horizons are evaluated. The obtained results demonstrate the potential of these methodologies to serve as robust predictors of future lane-changes of surrounding vehicles in time horizons between 1 and 2 seconds.